
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания

7.12. Электропривод подъемных установок и основные требования к электроприводу
Электропривод подъемных машин должен:
1) развивать большой начальный пусковой момент, иметь большую перегрузочную способность и реверсироваться;
2) обеспечивать независимость частоты вращения от изменения нагрузки;
3) осуществлять динамическое торможение;
4) работать устойчиво при максимальной и минимальной скоростях при изменении нагрузки;
5) обеспечивать регулирование скорости в широких пределах – от 0 до vmax и от vmax до 0;
6) быть удобным для автоматического управления, надежным и безопасным в работе.
Этим требованиям удовлетворяют в основном два типа электродвигателей: асинхронный с фазным ротором и постоянного тока с независимым возбуждением. Асинхронные электродвигатели широко используются в приводе подъемных машин малой и средней мощностей до 1200 Вт и в двухдвигательном приводе с суммарной мощностью до 2000 Вт, двигатели постоянного тока используются при большой мощности привода – более 1000 Вт. Из-за потерь энергии в реостатах при управлении асинхронными двигателями экономически целесообразнее при большой мощности применять двигатели постоянного тока [1, 15, 16].
Замедление подъемной машины с асинхронным двигателем осуществляется механическим торможением при отключении электродвигателя и с помощью электродвигателя. В последнем случае электродвигатель может использоваться для двигательного замедления и динамического торможения.
Двигательное замедление осуществляется введением сопротивлений в цепь ротора и применяется в режиме, когда при свободном выбеге системы требуется небольшое двигательное усилие для дотягивания.
Динамическое торможение осуществляется отключением статора от сети переменного тока и питанием его постоянным током. В статоре создается постоянное магнитное поле. Взаимодействие этого поля с индуктируемым магнитным полем в роторе создает тормозной момент, который может регулироваться изменением величины постоянного тока и сопротивлений реостата в цепи ротора.
Динамическое торможение дает возможность регулировать скорость в широких пределах.
Как при двигательном, так и при динамическом торможении в конце накладываются механические тормоза.
Наиболее часто применяется первый способ управления замедлением подъемной машины с асинхронным приводом – механическое торможение.
Скорость подъемного двигателя постоянного тока регулируется изменением напряжения, подаваемого на его якорь от преобразователя тока. В случае преобразователя по системе Г-Д постоянный ток на якорь подъемного двигателя поступает от генератора, э.д.с. которого зависит от тока в его обмотке возбуждения. При использовании системы привода ТП-Д (тиристорный преобразователь-двигатель) постоянный ток к двигателю поступает от тиристорного преобразователя с устройством управления приводом.
Мощность электродвигателя подъемной машины обычно определяется в два этапа. На первом этапе производится ориентировочный расчет мощности и выбор электродвигателя для определения момента инерции (необходимого при построении диаграмм усилий) и сравнения различных вариантов проектируемого подъема. На втором этапе проводится уточненный расчет установленной мощности электродвигателя.
Ориентировочная мощность электродвигателя определяется по формуле:
 (7.52)
(7.52)
где ρ – коэффициент, называемый по предложенной терминологии акад. М. М. Федорова характеристикой динамического режима и зависящий от момента инерции подъемной установки, степени ее неуравновешенности и множителя скорости α; К – коэффициент, учитывающий увеличение нагрузки за счет вредных сопротивлений; ηр – к.п.д. редуктора подъемной машины.
На основе опыта проектирования принимают следующие значения ρ подъемных установок: с неопрокидными скипами 1,3-1,4; с опрокидными скипами 1,4-1,5; с неопрокидными клетями 1,5-1,6; с опрокидными клетями 1,8-2,2 и для многократных установок 1,2-1,3.
Полезная мощность электродвигателя Nпол (без учета потерь), затрачиваемая на подъем полезного груза с массой mг средней скоростью:
для однососудной установки с противовесом
 (7.53)
(7.53)
для двухсосудной вертикальной установки
 (7.54)
(7.54)
где ψ – коэффициент, учитывающий степень уравновешивания массы груза mг массой противовеса; vср – средняя скорость движения сосуда, м/с:
 (7.55)
(7.55)
Окончательно мощность электродвигателя подъемной машины выбирается по допустимому нагреву его обмоток и электродвигатель проверяется на перегрузочную способность по максимальным усилиям в подъемной установке. При переменных по величине нагрузках подъемных машин мощность электродвигателя по нагреву определяется исходя из эквивалентных усилий. Под эквивалентным усилием Fэк понимают такое воображаемое постоянное усилие, при котором в двигателе выделяется в течение времени Тэк такое же количество теплоты, как при работе двигателя с фактическими переменными нагрузками Fд за цикл подъема Т:
 (7.56)
(7.56)
где kд и kп – коэффициенты, учитывающие ухудшение охлаждения электродвигателей в переходные периоды и во время пауз, принимают
kд = 0,6 – 0,7 и kп = 0,25 – 0,4; θ – пауза между циклами подъема, с.
В общем случае эквивалентное усилие выражается формулой
 (7.57)
(7.57)
если mк ≠ m’к или уравновешивающий канат не применяется, и
 (7.58)
(7.58)
если mк = m’к,
где Fi1 и Fi2 – величина движущего усилия соответственно в начале и конце интервала времени ti.
Для промежутков времени, когда электродвигатель отключен от сети, значения интегралов равны нулю.
Мощность электродвигателя подъемной машины определяется по эквивалентному усилию Fэк:
 (7.59)
(7.59)
где ηр – к.п.д. редуктора подъемной машины.
Мощность двигателя принимается больше расчетной на 10-15 % с учетом возможного падения напряжения в электрической сети [1].
Выбранный электродвигатель проверяется на допустимую перегрузку
 (7.60)
(7.60)
где γ – перегрузочная способность электродвигателей; Fд max – максимальное движущее усилие, установленное по диаграмме; Fн – номинальное усилие двигателя, определяется по его номинальному моменту и приводится к ободу канатоведущего органа.
Определение расхода энергии и к.п.д. подъемной установки
|
|
|
Рис. 7.23. Диаграмма мощности, |
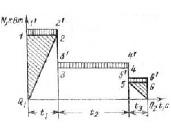
Расход энергии из сети определяется по диаграммам мощности и зависит от типов электродвигателей. Диаграммы мощности (рис. 7.23) на валу канатоведущего органа строятся на основании диаграмм скорости и усилий с использованием формулы при органе навивки с постоянным радиусом [1].
 (7.61)
(7.61)
где Fi, и vi – усилие на канатоведущем органе и скорость движения сосуда в момент времени ti.
Расход энергии Wц из сети за цикл равен площади диаграммы мощности, потребляемой из сети, кВт·ч:
 (7.62)
(7.62)
где n – число периодов диаграммы; Км – 1,03-1,05 – коэффициент, учитывающий расход энергии во время маневров и торможения; Niср – средняя мощность за i-й период диаграммы, при линейном изменении мощности определяется как среднее значение мощности в начале Ni2 и в конце Niср периода, Niср = (Ni1 + Ni2)/2.
Расход энергии Wт на 1 т поднимаемой массы груза, кВт·ч:
 (7.63)
(7.63)
где Gг – грузоподъемность подъемного сосуда, т.
Расход энергии на 1 т·км при высоте подъема Н:
 (7.64)
(7.64)
Годовой расход электроэнергии Wг подъемной установки, кВт·ч:
Wг = Qг ∙ Wт (7.65)
где Qг – годовая производительность установки, т.
К.п.д. подъемной установки определяется как отношение полезного расхода энергии за цикл к расходу энергии, потребляемой из сети:
 (7.66)
(7.66)
Полезный расход энергии за цикл у вертикальных двухсосудных подъемных установок, кВт·ч:
 (7.67)
(7.67)
К.п.д. подъемной машины будет больше к.п.д установки так как он не учитывает сопротивлений в стволе и направляющих шкивах.
 (7.68)
(7.68)
где К – коэффициент вредных сопротивлений.