
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
1.3. РЛС с синтезированной апертурой
Радиолокатор с синтезированной апертурой (РСА) – это активный датчик дистанционного зондирования с боковым обзором, размещаемый на борту летательного аппарата, например, беспилотного летательного аппарата, самолёта или космического летательного аппарата. Радиолокатор является активным датчиком в том смысле, что подсвечивает подстилающую поверхность для получения ответного сигнала на входе приемного устройства.
Процесс зондирования начинается, когда РСА посылает импульс в направлении земной поверхности. Импульс взаимодействует с земной поверхностью, поглощается, часть импульса отражается в сторону сенсора. На приемное устройство импульс приходит с некоторой задержкой. Сигнал на выходе радиолокатора является комплексным и после специальной обработки из него можно извлечь два параметра радиолокационного изображения – амплитуда (яркость) и фаза (напрямую связана с временной задержкой и длинной волны сенсора). Фаза может быть в дальнейшем использована для измерения высоты с точностью до единиц метров и пространственного сдвига подстилающей поверхности с точностью порядка сантиметров и даже миллиметров.
В общем случае размер антенны радиолокатора бокового обзора определяет максимально возможное теоретическое пространственное разрешение в азимутальном направлении: чем длиннее антенна, тем лучше разрешение. В отличие от обычного радиолокатора бокового обзора, РСА достигает высокого пространственного разрешения в азимутальном направлении формированием синтезированной апертуры. Принцип формирования синтезированной апертуры основан на приеме сигнала от одной и той же точки местности на протяжении достаточно длительного участка полета носителя РСА. При таком способе приема сигнала получается искусственное увеличение (синтезирование) линейного раскрыва антенны за счет движения носителя.
Интерферометрия – это метод измерений, использующий эффект интерференции электромагнитных волн. Техника интерферометрической обработки данных РСА предполагает получение нескольких когерентных измерений одного и того же района на земной поверхности со сдвигом в пространстве приёмной антенны радиолокатора. То, что РСА является активным датчиком, делает возможным получение требуемых измерений независимо от времени суток и погодных условий. Таким образом, мы получаем прекрасный инструмент для построения цифровых моделей рельефа и для наблюдения за земной поверхностью.
Наиболее актуальными в современных условиях являются следующие направления использования радиолокационных средств ДЗЗ:
– картирование труднодоступных территорий, в том числе, покрытых густой растительностью;
– обновление элементов содержания топографических карт;
– построение ЦМР;
– мониторинг ледовой обстановки в арктических морях с целью уточнения положения береговой линии морей и обеспечения судоходства в сложных метеоусловиях;
– оперативный контроль морских экономических зон и районов хозяйственной деятельности;
– мониторинг чрезвычайных ситуаций (последствия стихийных бедствий и техногенных катастроф на море и на суше).
Среди большого количества задач, решаемых по радиолокационным изображениям земной поверхности, в настоящей работе мы сосредоточим основное внимание на задачах распознавания пространственно-распределённых объектов. Примерами таких задач могут служить следующие: распознавание нефтяных пятен, анализ морского волнения и ледовых образований, распознавание надводных кораблей и т.п.
Процессор распознавания нефтяных пятен предназначен для обнаружения нефтяных пятен на фоне однородной морской поверхности.
Входными данными для процессора служит радиолокационные изображения, импортированные во внутренний формат из одного из внешних форматов (CEOS, XML). Результатом обработки является растровое бинарное изображение с обнаруженными нефтяными пятнами и набор параметров, характеризующих пятна (занимаемая площадь на поверхности, географическое положение по широте и долготе). Полученное в результате обработки растровое бинарное изображение, представленное во внутреннем формате, может быть экспортировано в один из распространенных внешних форматов данных. Например, в графический формат Geo TIFF, который способен хранить географические координаты элементов изображения.
Процессор может работать как в автоматическом режиме, так и с участием оператора. Реализованный алгоритм имеет небольшое число параметров, варьирование которых позволяет повысить качество результата в случае сложных сцен.
Основные операции методики распознавания нефтяных пятен по данным РСА заключаются в следующем.
Импорт данных и служебной информации (чтение файла данных, чтение параметров из формата CEOS, XML, формирование параметров для обработки.
Предварительная обработка (выделение интересующего участка)
Адаптивная пороговая классификация (подсчет статистик по изображению, формирование файла порогового значения, пороговая классификация).
Итеративная классификация (вычисление параметров статистических моделей классов, формирование массива «перспективных» пикселей формирование массива приращений функции энергии, оптимизация функции энергии и получение новой классификации).
Итеративная фильтрация (анализ геометрии бинарного изображения, фильтрация бинарного изображения.
Подсчет статистик (вычисление суммарной площади нефтяных пятен).
Адаптивная пороговая классификация представляет собой пороговую классификацию с индивидуальным значением пороговой величины для каждого элемента изображения. Пороговая величина определяется по локальным статистическим характеристикам изображения. В результате проведения этого этапа обработки формируется начальная сортировка элементов изображения для последующей итеративной классификации.
Итеративный классификационный алгоритм оперирует не только в пространстве признаков, но и с исходным изображением. Это позволяет получить пространственно однородный результат классификации. Обработка проходит таким образом, чтобы оптимизировать некоторую функцию энергии на множестве возможных сортировок.
Итеративная фильтрация имеет своей целью повышение пространственной однородности результата классификации, и представляет собой нелинейную фильтрацию каскадом возрастающих по размеру окон.
Процессор распознавания кораблей (рис. 1.1) предназначен для выделения на фоне морской поверхности надводных судов, оценки их характеристик, таких, как: скорость и направление движения, размеры и координаты. Оценка скорости кораблей производится при наличии видимых на поверхности кильватерных следов.
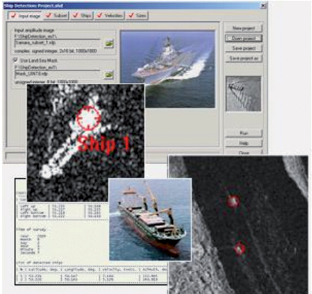
Рис. 1.1. Обнаружение и распознавание кораблей
Входными данными для процессора являются радиолокационные снимки морской поверхности в путевой системе координат в проекции наклонной или наземной дальности. Результатом обработки является векторный файл формата SHP с отметками обнаруженных кораблей и текстовый файл, содержащий перечень кораблей и оценки их параметров.
Поиск кораблей производится в автоматическом режиме с возможностью интерактивного редактирования оператором результатов поиска.
Оценка скорости производится по смещению судна относительно его кильватерного следа, выделенного в ручном режиме. Расчёт линейной скорости и направления движения производится процессором автоматически с использованием параметров КА, РСА и геометрии съёмки из состава служебной информации. Оценки размеров кораблей могут корректироваться в интерактивном режиме оператором.
Программа анализа морского волнения предназначена для формирования оценок пространственного периода, направления распространения и высоты крупных энергонесущих волн на морской поверхности по радиолокационным снимкам. Входными данными для программы являются геореференцированные (в проекции линия пути – наземная дальность) снимки.
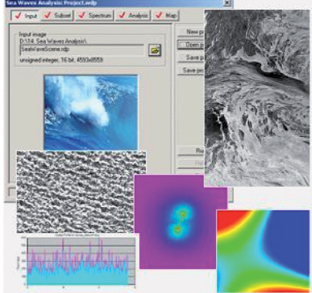
Рис. 1.2. Программа анализа морского волнения
В качестве первичного источника анализа программа формирует периодограмму морской поверхности с использованием БПФ и рассчитывает статистически устойчивые оценки спектра. Для уменьшения уровня боковых лепестков и повышения гладкости спектральных оценок используются весовые функции и пространственная фильтрация спектра.
По результатам анализа характеристик волнения программа способна построить карту пространственного распределения скоростей приводного ветра в предположении, что спектр волнения описывается распределением Пирсона – Мошковича.
Результатом работы программы является набор растровых карт, характеризующих распределение пространственного периода и направления волнения, высоты волн и скорости ветра.
Программа способна работать как в автоматическом режиме, так и с участием оператора.