
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
5.8. Интерферометрические РСА для измерения высот целей
Интерферометрическая РСА формирует два радиолокационных изображения с помощью антенн, разнесённых по высоте. Названные изображения сравниваются между собой для получения информации о высоте местности. Интерферометрические РСА могут быть выполнены на одном носителе с двумя антеннами (при этом карта высот формируется за один пролёт носителя РСА) или на одном носителе, но с формированием изображения за два пролёта над одним и тем же участком наблюдаемой поверхности.
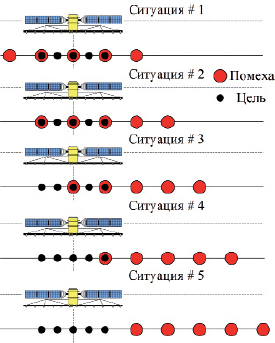
Рис. 5.20. Ситуации взаимного расположения многоэлементной цели и помех

Рис. 5.21. Характеристики обнаружения многоэлементной цели
Интерферометрические РСА с формированием изображения за два прохода обладают очевидным недостатком, связанным с необходимостью очень точно синхронизировать положения антенн и возможностью изменения состояния поверхности между пролётами, так как такое время может составлять часы и более.
В интерферометрических РСА, формирующих РЛИ за один пролёт состояние участка поверхности абсолютно одинаково, база (расстояние между антеннами) фиксирована и неизменна.
Для понимания теоретических основ работы интерферометрических РСА рассмотрим две антенны, разнесённые по вертикали на расстояние L (рис. 5.22).
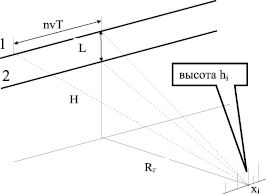
Рис. 5.22. Траектории интерферометрической РСА
Определим оптимальный алгоритм определения высоты y по данным двух каналов приёма, разнесённых по вертикали на величину L. Напряжения на входах названных каналов определяются выражениями:


где 
 – амплитуды сигналов от i-й точки цели в первом и втором приёмниках, разнесённых по вертикали на расстояние L;
– амплитуды сигналов от i-й точки цели в первом и втором приёмниках, разнесённых по вертикали на расстояние L; 
 – запаздывания сигналов от i-й точки цели в первом и втором приёмниках в n-й точке траектории ЛА;
– запаздывания сигналов от i-й точки цели в первом и втором приёмниках в n-й точке траектории ЛА; 
 – начальные фазы сигналов от i-й точки цели в первом и втором приёмниках
– начальные фазы сигналов от i-й точки цели в первом и втором приёмниках
Запишем выражения для запаздывания в первом и втором приёмниках:
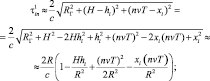 (5.8.1)
(5.8.1)
 (5.8.2)
(5.8.2)
где xi – координата точки цели, которую в дальнейшем считаем равной 0; множитель  – компенсируется при обработке (традиционная ЛЧМ-демодуляция отражённых сигналов в РСА).
– компенсируется при обработке (традиционная ЛЧМ-демодуляция отражённых сигналов в РСА).
С учётом выражений (5.8.1) и (5.7.2) комплексные амплитуды сигналов, принимаемых первым и вторым приёмниками имеют вид:
 (5.8.3)
(5.8.3)
 (5.8.4)
(5.8.4)
где 
 – комплексные амплитуды сигналов, отражённых от точки поверхности, имеющей высоту h;
– комплексные амплитуды сигналов, отражённых от точки поверхности, имеющей высоту h; 
 – комплексные амплитуды шума с нулевыми математическими ожиданиями и дисперсиями
– комплексные амплитуды шума с нулевыми математическими ожиданиями и дисперсиями  .
.
В дальнейшем считаем  так как дальности до точки цели и ракурсы её наблюдения практически одинаковы
так как дальности до точки цели и ракурсы её наблюдения практически одинаковы 
Для получения оптимального алгоритма оценивания высоты точки цели h запишем функцию правдоподобия:
 (5.8.5)
(5.8.5)
где  (5.8.6)
(5.8.6)
 (5.8.7)
(5.8.7)
где 
После подстановки (6) и (7) в (5), получаем:
 (5.8.8)
(5.8.8)
Для отыскания оптимального решения рассмотрим слагаемое в показателе, зависящее от ρ:
 (5.8.9)
(5.8.9)
Дифференцируя по h и приравнивая результат к 0, получаем выражение:
 (5.8.10)
(5.8.10)
Отсюда следует, что оптимальная оценка высоты данной точки поверхности определяется из выражения:

Нетрудно проверить, что мы действительно получаем несмещённую асимптотически эффективную оценку высоты отдельной точки поверхности. Структурная схема алгоритма обработки показана на рис. 5.23.
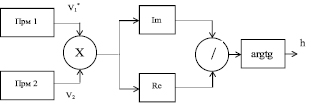
Рис. 5.23. Блок схема алгоритма оценки высоты элемента поверхности