
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
Шигин А. О., Гилев А. В., Шигина А. А.,
3.2. Теория рабочего процесса адаптивного привода подачи рабочего органа и управление режимами бурения скважин буровыми станками в сложноструктурных породных массивах
В случае применения в качестве адаптивного электромагнитного привода [123, 124] подачи бурового станка, особый интерес представляет линейный асинхронный двигатель. Принцип работы асинхронной машины основан на наведении переменного магнитного поля за счет пропускания переменного тока в обмотке статора. Переменное магнитное поле создает переменное напряжение в обмотке ротора. Вторичное магнитное поле сцепляется с первичным и их взаимодействие создает усилие или момент. Принципиальное отличие асинхронных машин заключается в конструкции ротора. Ротор асинхронной машины может быть короткозамкнутым, фазным, либо массивным. Короткозамкнутый ротор характеризуется наличием металлических жил, имеющих высокую электропроводность. Фазный ротор характеризуется наличием электрической обмотки ротора, запитываемой через контактные кольца. Массивным ротором является ферромагнитный элемент, не имеющий обмотки. Металл ротора выполняет роль магнитопровода и электрического проводника. Электрический ток в теле ротора, как правило, наводится в поверхностном слое. В связи с этим иногда массивный ротор покрывают слоем металла с высокой электропроводностью. Принципиальная схема асинхронного линейного двигателя с массивным ротором, позволяет использовать в качестве вторичного элемента (массивного ротора) секции бурового става.
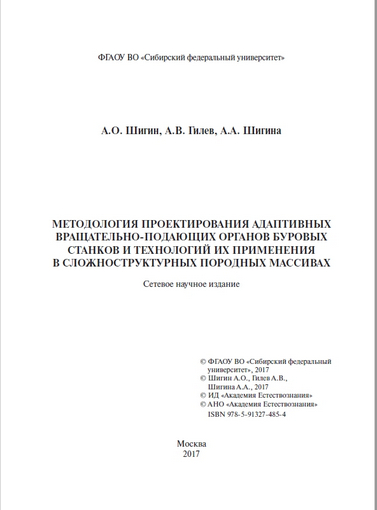
Одна из типовых конструкций трубчатого линейного двигателя представлена на рис. 3.5. Статор двигателя 1 имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки 2 (обмотки статора) и металлические шайбы 3, являющиеся частью магнитопровода. Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент 4 также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуктирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе.
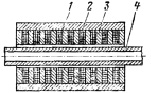
Рис. 3.5. Трубчатый линейный двигатель
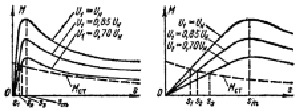
Асинхронная машина линейного действия имеет схожий вид механической характеристики. Отличие заключается в наличии краевых эффектов. Однако при условии применения в качестве массивного ротора трубы достаточно большой длины, влияние краевого эффекта оказывает меньшее значение [57]. Активное r2 и индуктивное Χσ2 сопротивления массивного ротора ввиду сильно выраженного поверхностного эффекта значительно зависят от скольжения. Так, в случае f1 = 50 Гц при пуске (S = 1) эквивалентная глубина проникновения токов в роторе составляет только 3 мм, при S = 0,02 – около 20 мм, при S = 0,001 – около 100 мм [58]. Поэтому при пуске сопротивление r2 весьма велико и Χσ2 мало, а с уменьшением скольжения сопротивление r2 уменьшается, а Χσ2 – увеличивается.
В результате сильного проявления поверхностного эффекта пусковой момент двигателя с массивным ротором достаточно велик
Мп /Мн = 1,5–2,0 (рис. 3.6).
Для создания достаточной величины пускового усилия подачи под нагрузкой необходимо применять трех фазную или многофазную схему.
Преимущество применения синхронного линейного двигателя по отношению к асинхронному заключается в следующем. Асинхронный линейный двигатель имеет низкий коэффициент мощности (cos φ) при больших воздушных зазорах в магнитной цепи, и его применение оказывается экономически невыгодным. Синхронный линейный двигатель, напротив, допускает наличие относительно большого воздушного зазора между статором и вторичным элементом и работает при этом с cosφ, близким к единице.
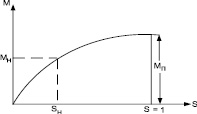
Рис. 3.6. Механическая характеристика асинхронного двигателя с массивным ротором
В статоре синхронного электродвигателя размещается обмотка, подключаемая к сети трехфазного тока и образующая вращающееся магнитное поле. Ротор двигателя состоит из сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор. Таким образом, для использования синхронного двигателя необходим как источник переменного, так и постоянного напряжения. Кроме того, к недостаткам применения синхронного двигателя в качестве привода подачи бурового станка, относится постоянство частоты вращения синхронного двигателя при различных нагрузках. Жесткость механической характеристики не позволит адаптивно воспринимать ударные нагрузки.
Из анализа принципов линейных электромагнитных двигателей на предмет применения в качестве адаптивного привода подачи бурового станка, оптимальным является трехфазный линейный асинхронный двигатель с массивным ротором.
Для определения характера работы электромагнитного привода вращательно-подающего механизма бурового станка необходимо выделить режимы его работы.
1. Плавное опускание бурового става на забой.
2. Пуск привода подачи в начале бурения.
3. Подача бурового става с буровым инструментом с заданной скоростью и усилием при вращении с заданной частотой.
4. Скачкообразное или плавное изменение показателя буримости.
5. Снижение до нуля скорости вращения и подачи бурового става (заклинивание).
6. Остановка бурения, подъем и разборка бурового става.
Опускание бурового става на забой. Скорость опускания бурового става на забой у существующих станков серии СБШ составляет 15–25 м/мин. Буровой став с инструментом на конце может опускаться как на поверхность так и на несколько метров в скважину. При этом привод подачи должен создавать усилие, обратное по направлению к движению, т.е. привод должен удерживать вес секций бурового става. Секции бурового става у СБШ-250 составляют 8 метров. При опускании на большую глубину секции добавляются. При этом вес бурового става ступенчато увеличивается.
а) Рекуперативное торможение асинхронного двигателя.
Режим рекуперативного торможения осуществляется в том случае, когда скорость ротора асинхронного двигателя превышает синхронную.
Режим рекуперативного торможения на практике применяется для двигателей с переключением полюсов и в приводах грузоподъемных машин (подъемники, экскаваторы и т.п.).
При переходе в генераторный режим вследствие изменения знака момента меняет знак активная составляющая тока ротора. В этом случае асинхронный двигатель отдает активную мощность (энергию) в сеть и потребляет из сети реактивную мощность (энергию), необходимую для возбуждения. Такой режим возникает, например, при торможении (переходе) двухскоростного двигателя с высокой на низкую скорость, как показано на рис. 3.7, а.
а б
Рис. 3.7. Торможение асинхронного двигателя в основной схеме включения:а – с рекуперацией энергии в сеть; б – противовключением
Предположим, что в исходном положении двигатель работал на характеристике 1 и в точке а, вращаясь со скоростью ωуст1. При увеличении числа пар полюсов двигатель переходит на характеристику 2, участок бс которой соответствует торможению с рекуперацией энергии в сеть.
Этот же вид торможения может быть реализован в системе преобразователь частоты – двигатель при останове асинхронного двигателя или при переходе с характеристики на характеристику. Для этого осуществляется уменьшение частоты выходного напряжения, а тем самым синхронной скорости ωо = 2πf / p.
В силу механической инерции текущая скорость двигателя ω будет изменяться медленнее чем синхронная скорость ωо, и будет постоянно превышать скорость магнитного поля. За счет этого и возникает режим торможения с отдачей энергии в сеть.
Рекуперативное торможение также может быть реализовано в электроприводе грузоподъемных машин при спуске грузов. Для этого двигатель включается в направлении спуска груза (характеристика 2 рис. 3.8, б). После окончания торможения он будет работать в точке со скоростью – ωуст2.
При этом осуществляется процесс спуска груза с отдачей энергии в сеть. Рекуперативное торможение является наиболее экономичным видом торможения. Аналогичные характеристики справедливы для линейного асинхронного двигателя при достаточно большой длине статора и ротора.
Применительно к электромагнитному приводу подачи бурового станка такой режим может быть осуществлен при помощи изменения частоты подаваемого в обмотку статора напряжения. При уменьшении частоты будет уменьшаться и синхронная скорость. При этом скорость опускания бурового става будет больше на величину, соответствующую весу бурового става и величине подаваемого напряжения.
Недостатком такого способа опускания бурового става на забой является наличие удара или толчка в момент касания бурового инструмента с поверхностью забоя. Существующие системы подачи на основе гидропривода также имеют такой недостаток. Для уменьшения силы удара можно только снижать скорость опускания по мере приближения поверхности забоя. Это достигается уменьшением частоты напряжения.
б) Торможение асинхронного электродвигателя противовключением.
Перевод асинхронного двигателя в режим торможения противовключением может быть выполнен двумя путями. Один из них связан с изменением чередования двух фаз питающего электродвигатель напряжения.
Допустим, что двигатель работает на характеристике 1 (рис. 3.7, б) при чередовании фаз напряжения АВС. Тогда при переключении двух фаз (например, В и С) он переходит на характеристику 2, участок аб которой соответствует торможению противовключением.
Обратим внимание на то обстоятельство, что при противовключении скольжение асинхронного двигателя изменяется от S = 2 до S = 1.
Ротор при этом вращается против направления движения поля и постоянно замедляется. Когда скорость спадает до нуля, двигатель должен быть отключен от сети, иначе он может перейти в двигательный режим, причем ротор его будет вращаться в направлении, обратном предыдущему.
При торможении противовключением токи в обмотке двигателя могут в 7–8 раз превышать соответствующие номинальные токи. Заметно уменьшается коэффициент мощности двигателя. О КПД в данном случае говорить не корректно, т.к. и преобразуемая в электрическую механическая энергия и энергия, потребляемая из сети, рассеиваются в активном сопротивлении ротора, и полезно используемой энергии в данном случае нет.
Другой путь торможения противовключением может быть использован при активном характере момента нагрузки, который создается, при опускании груза.
Допустим, что требуется осуществить спуск бурового става, обеспечивая его торможение с помощью линейного асинхронного двигателя. Для этого двигатель путем включения в цепь ротора добавочного резистора (сопротивления) переводится на искусственную характеристику (прямая 3 на рис. 3.7).
Вследствие превышения моментом нагрузки Мс пускового момента Мп двигателя и его активного характера груз может опускаться с установившейся скоростью – ωуст2. В этом режиме торможение скольжения асинхронного двигателя может изменяться от S = 1 до S = 2.
Преимуществом такого способа опускания бурового става на забой является наличие минимального удара или толчка в момент касания бурового инструмента с поверхностью забоя, поскольку усилие двигателя будет направлено встречно движению бурового става. Применение данного способа позволит уменьшить время данной операции в общем технологическом процессе.
в) Динамическое торможение асинхронного двигателя.
Для динамического торможения обмотки статора двигатель необходимо отключать от сети переменного тока и подключать к источнику постоянного тока, как это показано на рис. 3.8. Обмотка ротора при этом может быть закорочена, или в ее цепь включаются добавочные резисторы с сопротивлением 3.

а б
Рис. 3.8. Схема динамического торможения асинхронного двигателя (а) и схема включения обмоток статора (б)
Постоянный ток Iп, значение которого может регулироваться резистором 2, протекает по обмоткам статора и создает относительно статора неподвижное магнитное поле. При вращении ротора в нем наводится ЭДС, частота которой пропорциональна скорости. Эта ЭДС, в свою очередь, вызывает появление тока в замкнутом контуре обмотки ротора, который создает магнитный поток, также неподвижный относительно статора.
Взаимодействие тока ротора с результирующим магнитным полем асинхронного двигателя создает тормозной момент, за счет которого достигается эффект торможения. Двигатель в этом случае работает в режиме генератора независимо от сети переменного тока, преобразовывая кинетическую энергию движущихся частей электропривода и рабочей машины в электрическую, которая рассеивается в виде тепла в цепи ротора.
Данный способ не применим в качестве опускания бурового става на забой, поскольку не дает достаточных возможностей в регулировке скорости. При этом необходимы устройства для выпрямления напряжения, что добавляет трудностей,
Для опускания бурового става на забой наиболее рационально применять способ торможения асинхронного линейного электродвигателя противовключением, поскольку он позволяет минимизировать ударные нагрузки на буровой инструмент в момент его касания с поверхностью забоя и сократить время данной операции в общем технологическом процессе.
Пуск привода подачи в начале бурения. При рассмотрении возможных способов пуска в ход асинхронного линейного двигателя необходимо учитывать следующие основные положения:
1) двигатель должен развивать при пуске достаточно большое пусковое усилие, которое должно быть больше статического усилия сопротивления, чтобы ротор двигателя мог прийти в движение и достичь номинальной линейной скорости;
2) величина пускового тока должна быть ограничена таким значением, чтобы не происходило повреждения двигателя и нарушения нормального режима работы сети;
3) схема пуска должна быть по возможности простой, а количество и стоимость пусковых устройств – малыми.
При пуске асинхронного двигателя на холостом ходу в активном сопротивлении его вторичной цепи выделяется тепловая энергия, равная кинетической энергии приводимых во вращение маховых масс, а при пуске под нагрузкой количество выделяемой энергии соответственно увеличивается. Выделение энергии в первичной цепи обычно несколько больше, чем во вторичной.
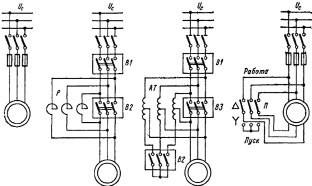
Наиболее простым способом пуска двигателя с массивным ротором является включение обмотки его статора непосредственно в сеть, на номинальное напряжение обмотки статора (рис. 3.9, а). Такой пуск называется прямым. При этом пусковой ток двигателя Iп = (4–7)∙Iн.
Если обмотка статора рассчитана на большие токи, то прямой пуск возможен, когда сеть достаточно мощна и пусковые токи двигателей не вызывают недопустимо больших падений напряжения в сети (не более 10–15 %). Современные энергетические системы, сети и сетевые трансформаторные подстанции обычно имеют такие мощности, что в подавляющем большинстве случаев возможен прямой пуск асинхронных двигателей. Если буровой станок не подключен к достаточно мощной электрической сети, или работает от дизель-генератора, то такой способ не допустим.
Если по условиям падения напряжения в сети прямой пуск двигателя невозможен, применяются различные способы пуска двигателя при пониженном напряжении (рис. 3.9, б, в, г). Однако при этом пропорционально квадрату напряжения на зажимах обмотки статора или квадрату пускового тока двигателя понижается также пусковое усилие, что является недостатком пуска при пониженном напряжении.
Реакторный пуск осуществляется согласно схеме рис. 3.9, б. Сначала включается выключатель В1, и двигатель получает питание через трехфазный реактор (реактивную или индуктивную катушку) Р, сопротивление которого хр ограничивает величину пускового тока. По достижении нормальной скорости вращения включается выключатель В2, который шунтирует реактор, в результате чего на двигатель подается нормальное напряжение сети.
а б в г
Рис. 3.9. Схемы способов пуска двигателя с массивным ротором: а – прямой; б – реакторный; в – автотрансформаторный; г – с переключением со звезды на треугольник
Пусковые реакторы строятся обычно с ферромагнитным сердечником и рассчитываются по нагреву только на кратковременную работу, что позволяет снизить их вес и стоимость. Для весьма мощных двигателей применяются также реакторы без ферромагнитного сердечника, с обмотками, укрепленными на бетонном каркасе. Выключатель В1 выбирается на такую отключающую мощность, которая позволяет отключить двигатель при глухом коротком замыкании за выключателем, а выключатель В2 может иметь низкую отключающую мощность.
Если составляющие сопротивления короткого замыкания двигателя равны rк и хк, то начальный пусковой ток при прямом пуске

а при реакторном пуске, при пренебрежении активным сопротивлением реактора,

Следовательно, при реакторном пуске начальный пусковой ток уменьшается в
 раз.
раз.
Во столько же раз уменьшается также напряжение на зажимах двигателя в начальный момент пуска. Начальное пусковое усилие при реакторном пуске Fпр уменьшается по сравнению с моментом при прямом пуске Fпп в
 раз.
раз.
В приведенных соотношениях не учитывается изменение величины хк при изменении величины пускового тока. При необходимости нетрудно учесть это изменение.
Автотрансформаторный пуск линейного асинхронного трехфазного двигателя осуществляется по схеме рис. 3.9, б в следующем порядке. Сначала включаются выключатели В1 и В2, и на двигатель через автотрансформатор AT подается пониженное напряжение. После достижения двигателем определенной скорости выключатель В2 отключается, и двигатель получает питание через часть обмотки автотрансформатора AT, который в этом случае работает как реактор. Наконец включается выключатель В3, в результате чего двигатель получает полное напряжение.
Выключатель В1 должен быть выбран на отключающую мощность при коротком замыкании, а выключатели В2 и В3 могут иметь, меньшие отключающие мощности. Пусковые автотрансформаторы рассчитываются на кратковременную работу. Согласно ГССТ 3211–46, пусковые автотрансформаторы должны иметь ответвления, соответствующие величинам вторичного напряжения, равным 73, 64 и 55 % [58] от первичного при прямой схеме включения и 45, 36 и 27 % при обратной схеме включения (рис. 3.10). В каждом конкретном случае выбирается подходящая ступень напряжения.

а б
Рис. 3.10. Прямая (а) и обратная (б) схемы включения пусковых автотрансформаторов
Пусковой ток в двигателе или на стороне низкого напряжения автотрансформатора уменьшается также в kaт (коэффициент трансформации автотрансформатора) раз, а пусковой ток на стороне высокого напряжения автотрансформатора или в сети уменьшается в  раз. Пусковое усилие Fп, пропорциональное напряжению на зажимах двигателя, уменьшается также в
раз. Пусковое усилие Fп, пропорциональное напряжению на зажимах двигателя, уменьшается также в  раз
раз
Таким образом, автотрансформаторный пуск оказывается более благоприятным для сети, чем реакторный, если сравнение пусков производится при одинаковых пусковых усилиях. Если же сравнивать пуски при одинаковых значениях пускового тока в сети, то пусковое усилие при автотрансформаторном пуске будет в  раз больше, чем при реакторном.
раз больше, чем при реакторном.
Однако это преимущество автотрансформаторного пуска достигается ценой значительного усложнения и удорожания пусковой аппаратуры. Поэтому автотрансформаторный пуск применяется реже реакторного, при более тяжелых условиях, когда реакторный пуск не обеспечивает необходимого пускового момента.
Пуск переключением «звезда – треугольник» (рис. 3.9, г) может применяться в случаях, когда выведены все шесть концов обмотки статора и двигатель нормально работает с соединением обмотки статора в треугольник, например, когда двигатель на 380/220 В и с соединением обмоток Y/A работает от сети 220 В. В этом случае при пуске обмотка статора включается в звезду (нижнее положение переключателя П на рис. 3.9, г), а при достижении нормальной скорости вращения переключается в треугольник (верхнее положение переключателя П на рис. 3.9, г). При таком способе пуска по сравнению с прямым пуском при соединении обмотки в треугольник напряжение фаз обмоток уменьшается в  раза, пусковой момент уменьшается в
раза, пусковой момент уменьшается в  раза, пусковой ток в фазах обмотки уменьшается в
раза, пусковой ток в фазах обмотки уменьшается в  раза, а в сети – в
раза, а в сети – в  раза. Таким образом, рассматриваемый способ пуска равноценен автотрансформаторному пуску при
раза. Таким образом, рассматриваемый способ пуска равноценен автотрансформаторному пуску при  .
.
Недостатком этого способа пуска по сравнению с реакторным и автотрансформаторным является то, что при пусковых переключениях цепь двигателя разрывается, что связано с возникновением коммутационных перенапряжений.
Пуск электромагнитного привода подачи бурового станка необходимо осуществлять при опущенном на забой буровом ставе. В связи с этим нет возможности пуска на холостом ходу. Пуск двигателя будет происходить под нагрузкой в режиме короткого замыкания. Т.е. скорость будет минимальной. И в установившемся режиме (т.е. в процессе бурения) скорость составляет 0–0,3 м/мин. Поэтому очевидно, что пуск должен быть прямым. Но частота напряжения сети должна регулироваться вниз от частоты напряжения сети. И пуск должен осуществляться при низких частотах и в процессе бурения частота напряжения должна увеличиваться.
Подача бурового става с буровым инструментом с заданной скоростью и усилием при вращении с заданной частотой. Способы регулирования скорости поступательного движения ротора линейного асинхронного двигателя, можно подразделить на два класса:
1) регулирование скорости движения первичного магнитного поля, что достигается либо регулированием первичной частоты f1 либо изменением числа пар полюсов р двигателя;
2) регулирование скольжения двигателя s при v = const. В первом случае КПД двигателя остается высоким а во втором случае КПД снижается тем больше, чем больше s, так как при этом мощность скольжения теряется во вторичной цепи двигателя.
Регулирование скорости изменением первичной частоты (частотное регулирование) требует применения источников питания с регулируемой частотой (синхронные генераторы с переменной скоростью вращения, ионные или полупроводниковые преобразователи частоты и др.)
Существенное изменение величины потока Ф при регулировании скорости нежелательно, так как увеличение Ф против нормального вызывает увеличение насыщения магнитной цепи и сильное увеличение намагничивающего тока, а уменьшение Ф вызывает недоиспользование машины, уменьшение перегрузочной способности и увеличение тока I2 при том же значении усилия подачи и т.д. Поэтому в большинстве случаев целесообразно поддерживать Ф = const. Для этого одновременно с регулированием частоты пропорционально ей необходимо изменять также напряжение
U1 = E1 = 4,44f1w1kоб1Φ.
Отступление от этого правила целесообразно только в случаях, когда Fст быстро уменьшается с уменьшением скорости. В этом случае более быстрое уменьшение U1 по сравнению с f1 вызывает уменьшение Ф и улучшает энергетические показатели двигателя (cos φх и КПД). И в то же время уменьшение Fст с точки зрения перегрузочной способности не опасно.
При широком диапазоне регулирования правильнее поддерживать f2 /f1 = const.
К недостаткам частотного регулирования относится громоздкость и высокая стоимость питающей установки. Но часто буровые станки оснащены преобразователями частоты, и данный способ регулирования является наиболее выгодным и удобным.
Регулирование скорости изменением числа пар полюсов р может использоваться для двигателей с массивным ротором, так как при этом требуется изменять р только для обмотки статора. Изменять р можно двумя способами:
1) применением на статоре нескольких обмоток, которые уложены в общих пазах и имеют разные числа пар полюсов р;
2) применением обмотки специального типа, которая позволяет получить различные значения р путем изменения (переключения) схемы соединений обмотки.
Существует значительное количество различных схем обмоток с переключением числа пар полюсов, однако широкое распространение из них получили только некоторые. Применение нескольких обмоток невыгодно, так как при этом из-за ограниченного места с пазах сечение проводников каждой из обмоток нужно уменьшать, что приводит к снижению мощности двигателя. Использование обмоток с переключением числа пар полюсов вызывает усложнение коммутационной аппаратуры, в особенности, если с помощью одной обмотки желают получить более двух скоростей вращения. Несколько ухудшаются также энергетические показатели двигателей.
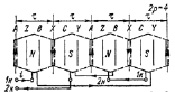
Каждая фаза обмотки с переключением числа пар полюсов в отношении 2:1 (рис. 3.11) состоит из двух частей, или половинок, с одинаковым количеством катушечных групп в каждой части.
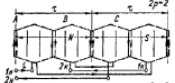
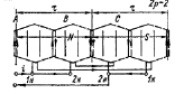
Когда обе части обмотки обтекаются токами одинакового направления, обмотка создает магнитное поле с большим числом полюсов (рис. 3.11, а, 2р = 4), а при изменении направления тока в одной части обмотки на обратное число полюсов уменьшается вдвое (рис. 3.11, б и в, 1р = 2). Подобные переключения производятся во всех фазах одновременно, и переключаемые части обмотки могут соединяться последовательно (рис. 3.11, а и б) или параллельно (рис. 3.11, в).
Скорость и усилие подачи бурового станка должны регулироваться плавно и в широком диапазоне. Таким образом, способ регулирования изменением числа пар полюсов не применим для электромагнитной системы подачи бурового станка.
Регулирование скорости уменьшением величины первичного напряжения. При уменьшении U1 момент двигателя изменяется пропорционально U1 соответственно изменяются механические характеристики (рис. 3.12, а, б), в результате чего, изменяются также значения рабочих скольжений. Очевидно, что регулирование s в этом случае возможно в пределах 0 < s < sm.
а
б
в
Рис. 3.11. Принципиальные схемы одной фазы обмотки с переключением числа полюсов:а – при 2р = 4; б, в – при 2р = 2
Для получения достаточно большого диапазона регулирования скорости необходимо, чтобы активное сопротивление цепи ротора и соответственно sm были, достаточно велики (рис. 3.12, б).
Поскольку регулирование скорости подачи изменением напряжения способствует пропорциональному изменению усилия подачи, то не будет возможности регулировать эти параметры независимо друг от друга. Поэтому для регулирования параметров режимов бурения этот способ не подходит.
а б
Рис. 3.12. Механические характеристики асинхронных двигателей при различных величинах первичного напряжения
Известны также другие способы регулирования скорости и усилия подачи. Это способ регулирования асинхронного двигателя с помощью реактора с подмагничиванием постоянным током и способ импульсного регулирования скорости асинхронного двигателя. Но по причине большей сложности и недостижимости плавного регулирования, эти способы также не подходят для электромагнитной системы подачи бурового станка.
Скачкообразное или плавное изменение показателя буримости. Изменение показателя буримости затрудняет или облегчает продвижение бурового инструмента сквозь породу. В случае применения электромагнитного привода подачи бурового станка, эти изменения будут отражаться на изменениях электрических параметров электрической машины. Изменение нагрузки асинхронной машины приводит к соответствующему изменению скольжения.
Выражение для электромагнитного усилия для линейной асинхронной машины справедливо для любого режима работы и может быть использовано для построения зависимости усилия от скольжения при изменении последнего от +∞ до –∞ (рис. 3.13).
Рассмотрим часть этой характеристики, соответствующая режиму двигателя, т.е. при скольжении, изменяющемся от 1 до 0. Обозначим усилие, развиваемое двигателем при пуске в ход (S = 1) как Fпуск. Скольжение, при котором момент достигает наибольшего значения, называют критическим скольжением Sкр, а наибольшее значение усилия – критическим усилием Fкр. Тогда перегрузочная способность двигателя
λ = Fкр /Fн.
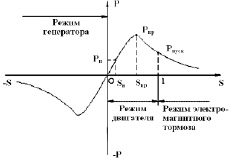
Рис. 3.13. Зависимость усилия, создаваемого линейным асинхронным приводом от скольжения
Критическое усилие Fкр и скольжение Sкр с учетом электрического сопротивления


Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U1 снижается перегрузочная способность асинхронного двигателя.
Из выражения, известного под названием «формула Клосса», получим выражение удобное для построения F = f(S).

Если в эту формулу подставить вместо F и S номинальные значения момента и скольжения (Fн и Sн), то можно получить соотношение для расчета критического скольжения.

Участок характеристики (рис. 3.13), на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой работе двигателя. На этом участке располагается точка номинального режима (Fн, Sн). В пределах изменения скольжения от 0 до Sкр изменение нагрузки на валу двигателя будет приводить к изменению частоты вращения ротора, изменению скольжения и вращающего момента. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения и электромагнитного (вращающего) момента. Если момент нагрузки превысит критический момент, то двигатель остановится.
Участок характеристики, на котором скольжение изменяется от Sкр до 1, соответствует неустойчивой работе двигателя. Этот участок характеристики двигатель проходит при пуске в ход и при торможении.
Механической характеристикой линейного асинхронного двигателя является зависимость линейной скорости ротора в функции от электромагнитного усилия v = f(F). Эту характеристику (рис. 3.14) можно получить, используя зависимость F = f(S) и пересчитав линейную скорость ротора при разных значениях скольжения.
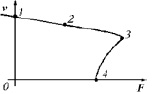
Рис. 3.14. Общий вид
механической характеристики линейного асинхронного привода
Так как S = (v0 – v)/v0, отсюда v = v0(1 – S).
При этом линейная скорость магнитного поля

где l – длина статора линейного двигателя, м; f – частота напряжения сети, Гц; p – число пар полюсов статора.
Участок 1–3 соответствует устойчивой работе, участок 3–4 – неустойчивой работе. Точка 1 соответствует идеальному холостому ходу двигателя, когда n = n0. Точка 2 соответствует номинальному режиму работы двигателя, ее координаты Fн и vн. Точка 3 соответствует критическому моменту Fкр и критической частоте вращения vкр. Точка 4 соответствует пусковому моменту двигателя Fпуск. Механическую характеристику можно рассчитать и построить по паспортным данным. Точка 1:

Точка 2 с координатами vн и Fн. Номинальная скорость vн равна среднему значению скорости бурения в заданном режиме. Номинальное усилие рассчитывается по формуле:

где Pн – номинальная мощность.
Точка 3 с координатами Fкрvкр. Критический момент рассчитывается по формуле Fкр = Fнλ. Перегрузочная способность λ задается в паспорте двигателя vкр = v0(1 – Sкр);  Sн = (v0 – vн)/v0 – номинальное скольжение.
Sн = (v0 – vн)/v0 – номинальное скольжение.
Точка 4 имеет координаты v = 0 и F = Fпуск. Пусковое усилие вычисляют по формуле
Fпуск = Fнλпуск,
где λпуск – кратность пускового момента задается в паспорте.
Асинхронные двигатели имеют достаточно жесткую ниспадающую механическую характеристику на участке 1–3, т.к. скорость ротора мало зависит от осевой нагрузки. Однако по сравнению с характеристикой гидравлического линейного двигателя она является более мягкой и адаптивной.
На рис. 3.15 показаны режимы работы линейного электромагнитного привода при плавно изменяющейся и резко возрастающей нагрузке.
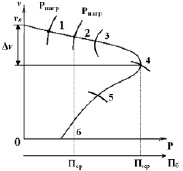
Рис. 3.15. Работа линейного электромагнитного привода при плавно изменяющейся и резко возрастающей нагрузке
Рассмотрим случай плавного увеличения и уменьшения показателя буримости при бурении однородной по свойствам породы. В начальный момент двигатель работает в номинальном режиме (точка 2). При увеличении показателя буримости естественным путем снижается скорость бурения и линейная скорость двигателя. При этом увеличивается скольжение, и точка рабочего режима перемещается в точку 3. При снижении показателя буримости, скорость бурения и линейная скорость двигателя естественным путем увеличиваются. При этом скольжение двигателя уменьшается, и точка рабочего режима перемещается из точки 3 в точку 2. Аналогично точка рабочего режима двигателя смещается в другую сторону. Если в начальный момент двигатель работает в номинальном режиме (точка 2) и показатель буримости снижается, то скорость бурения и линейная скорость двигателя также естественным путем снижаются. При этом уменьшается скольжение, и точка рабочего режима перемещается в точку 1. Затем при увеличении показателя буримости, скорость бурения и линейная скорость двигателя естественным путем уменьшаются. Скольжение двигателя увеличивается, и точка рабочего режима перемещается из точки 1 в точку 2.
Поскольку рабочая часть механической характеристики является наклонной, то в случае резких изменений показателя буримости и соответственном изменении линейной скорости подачи бурового става, точка рабочего режима также будет иметь возможность перемещения. Минимальное время перемещения точки рабочего режима будет способствовать уменьшению ударных нагрузок. Время задержки при перемещении точки рабочего режима асинхронной машины характеризуется временем переходного процесса. Самый сложный для обмотки статора переходной процесс из возможных – это внезапно возникший режим короткого замыкания, т.е. внезапное заклинивание и остановка. В этом случае максимальный ток будет равен 1,2–1,35 от величины установившегося тока. Такой ток возникнет в одной из фаз примерно через половину периода колебания переменного тока сети переменного напряжения [68]. Т.е. время задержки при перемещении точки рабочего режима асинхронной машины характеризуется временем половины периода колебания тока сети переменного напряжения. Таким образом, время возможного возникновения ударных нагрузок при частоте напряжения 50 Гц, сокращается до 0,01 с. Для сравнения, система с гидравлическим линейным двигателем не реагирует адаптивно и ударные нагрузки воспринимаются полностью буровым инструментом и буровым ставом.
Для надежной работы шарошечных долот наиболее опасен случай резкого и значительного возрастания нагрузки, причиной которого
может быть соответствующее изменение показателя буримости. При работе электромагнитного привода подачи данная проблема решается следующим образом. В начальный момент двигатель работает в номинальном режиме (точка 2), точка которого находится недалеко от значения критического усилия Fкр. При резко возрастающей нагрузке, скорость бурения и линейная скорость двигателя естественным путем увеличиваются на величину Δv (рис. 3.46). При этом режим перемещается из точки 2 в точку 4. В случае, если линейная скорость уменьшается на значение больше величины Δv, то режим перемещается из точки 4 в точку 5. Такой режим работы двигателя сопровождается увеличением токов, вплоть до значения тока короткого замыкания. И высокий ток удерживается в таком значении, пока не увеличится естественным путем линейная скорость. Либо, при длительной задержке точки рабочего режима, возможно автоматическое регулирование с использованием преобразователя частоты напряжения с целью изменения механической характеристики, в которой установившаяся линейная скорость будет равна номинальной. По указанным причинам при проектировании электромагнитного привода подачи для бурового станка, работа которого предполагается преимущественно со сложноструктурными массивами, обмотка должна быть рассчитана на длительные перегрузки и большие токи. А также необходима система автоматического регулирования режима работы двигателя.
Снижение до нуля скорости вращения и подачи бурового става (заклинивание). Снижение скорости бурения до нуля возможно по причине заклинивания бурового инструмента при бурении трещиноватых пород, либо вследствие разрушения опор качения шарошек. В первом случае есть необходимость максимального смягчения удара для предотвращения разрушения опор шарошек долота, а также для смягчения ударных нагрузок, передаваемых на буровой став и вращательный механизм. Во втором случае также есть необходимость смягчения удара для предотвращения окончательного разрушения опор шарошек и потери шарошки в скважине. Потеря шарошки требует извлечения металлических частей специальными ловителями, что занимает значительное время. Во втором случае также есть опасность ударных нагрузок, передаваемых на буровой став и вращательный механизм.
Для данного режима характерно снижение линейной скорости ротора подающего механизма до нуля. Это вызывает внезапный режим короткого замыкания как во вращающем двигателе, так и в электромагнитном двигателе подачи. При этом механическая характеристика, при которой двигатель работал до удара, позволит уменьшить усилие подачи и линейную скорость до нуля, но ток возрастет до токов короткого замыкания.
В данном режиме существует три задачи:
1. Снизить силу ударных нагрузок.
2. Снизить токи в обмотках статора.
3. Восстановить вращение с минимальными перегрузками для долота.
1. При заклинивании асинхронный двигатель, как в системе подачи, так и в системе вращения снижает скорость согласно соотношению сил инерции и сил сопротивления породы. Если допустить мгновенное заклинивание, то вся кинетическая энергия преобразуется в потенциальную энергию деформации и разрушения породы и металла (2.1, 2.2).
Условно для пояснения процесса можно применить схему перехода долота из породы с одним показателем буримости в породу с более высоким показателем буримости (рис. 2.21). В данном случае скорость после переходного процесса v2 равна нулю.
В выражении (2.1) кинетическая энергия зависит от
1) величины мощности;
2) разности скоростей;
3) времени переходного процесса.
Мощность привода подачи можно регулировать величиной подаваемого напряжения. Сложность заключается в малом промежутке времени, за который необходимо изменить его значение. С данной задачей может справиться либо автоматическая отсечка напряжения, либо автоматический регулятор напряжения.
Отсечка напряжения наиболее простой и дешевый вариант, но его применение затрудняет последующий пуск. В этом случае для пуска будет необходимо поднимать буровой став, и забуриваться с вращающимся буровым инструментом и ставом. Автоматический регулятор напряжения может значительно снизить мощность, а также смягчить механическую характеристику. Снижение мощности позволит уменьшить силу удара, но также затрудняет последующий пуск. Заклинивание может быть пройдено при помощи увеличения напряжения привода вращателя. При этом энергия удара увеличивается, но облегчается последующий пуск.
Смягчение механической характеристики также позволит снизить энергию удара, поскольку в данном случае при увеличении нагрузки линейная скорость бурового става естественным путем уменьшается и увеличивается ток в обмотке.
Все методы, применяемые при регулировании мощности, не решают в полной мере проблему ударных нагрузок. Например, метод регулирования напряжения более эффективен в случае предупреждения ударных нагрузок. Например, если известно, что породы трещиноватые, то необходимо снижать напряжение при сохранении скорости подачи.
Более эффективным при возникших ударных нагрузках и заклинивании, является метод регулирования скорости подачи при сохранении мощности привода. Для этого необходимо применять регулятор частоты напряжения для уменьшения номинальной скорости в автоматическом режиме. Этот метод позволяет, как снизить ударные нагрузки, так и выйти из режима заклинивания, не прибегая к подъему бурового става.
Время процесса зависит от механических характеристик породы. Чем меньше показатель буримости, тем больше время процесса торможения бурового става, а значит пропорционально меньше сила удара. Однако, мы не имеем возможности влиять на показатель буримости породы, но можем заранее устанавливать номинальную линейную скорость бурового става с применением регулятора частоты напряжения.
2. Токи в обмотках статора зависят от величины напряжения и скорости подачи.
Ток в обмотке статора, как в номинальном режиме, так и в режиме короткого замыкания находится в прямой зависимости от напряжения и в обратной зависимости от среднего квадратичного сопротивлений.

Поэтому, в случае заклинивания для снижения токов короткого замыкания, снижение напряжения в автоматическом режиме является целесообразным. Однако, как было сказано выше, затрудняет дальнейший пуск.
При изменении нагрузки, соответственно изменяется скорость подачи, скольжение и ток в обмотке. Уменьшение линейной скорости до нуля при работе двигателя с определенной механической характеристикой, приводит к увеличению тока до значения тока короткого замыкания. В этом случае уменьшение тока осуществляется аналогичными способами, но также целесообразно применять регулирование частоты напряжения с изменением номинальной скорости подачи.
3. Восстановление вращения с минимальными перегрузками возможно в случае сохранения мощности и снижения скорости вращения с использованием регулятора частоты.
Остановка бурения, подъем и разборка бурового става. Остановка бурения заключается в плавном снижении усилия и скорости подачи, а также частоты вращения с дальнейшим реверсом подающего привода. В этом режиме есть опасность потери бурового инструмента в случае повреждения соединительной резьбы в процессе бурения. Поэтому подъем целесообразно осуществлять без резких толчков при остановке для разъема секций бурового става.
Таким образом, электромагнитное устройство, применяемое в качестве механизма подачи рабочего органа бурового станка способно выполнять основные функции, обусловленные технологией бурения. Также определено, что электромагнитные устройства обладают высокой адаптивностью, обусловленной наклоном механической характеристики и малым временем переходных процессов, что позволяет без применения автоматики устранять критические нагрузки на буровой инструмент в процессе бурения сложноструктурных породных массивов.
Для проектирования привода подачи адаптивного вращательно-подающего органа бурового станка необходимо создать оценить конструктивные и технологические параметры двигателей, способных выполнять подачу рабочего органа для осуществления шарошечного бурения. Основные задачи при проектировании двигателей заключаются в создании значительных подающих усилий (150–300 кН) и малых скоростей подачи рабочего органа (0,3–2 м/мин) при возможности изменения режимов для быстрого осуществления промежуточных операций.