
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
АВТОПРОЕКТИРОВАНИЕ ГОРНЫХ МАШИН В 3D: ПРОЕКТНО-МОДЕЛЬНЫЙ ПОДХОД
Бейсембаев К. М., Жолдыбаева Г. С., Дёмин В. Ф., Малыбаев Н. С., Шманов М. Н.,
3.2. Проектирование механизированной крепи
Далее проанализируем конструктивные особенности крепи. Вначале проведём анализ плоской схемы крепи (рис. 3.1) поддерживающе-оградительного типа с лемнисктным механизмом (четырёхзвенным) из двух рычагов – траверс (1,2) для обеспечения регулируемой податливости крепи при опускании поддерживающего перекрытия 3 и ограждения 4 с параллельным перемещением козырька 5 вдоль забоя. Имеются силовые гидроцилиндры: гидропатрон 6 для управления козырьком, гидростойка 7 и гидродомкрат 8 для управления углом установки перекрытия и ограждения. Рычаги, ограждение и козырёк соединены шарнирно. Вместо основания крепи рычаги прикреплены к неподвижным точкам – «земле» 9, 10, что во многих условиях не влияет на расчёты нагруженности.
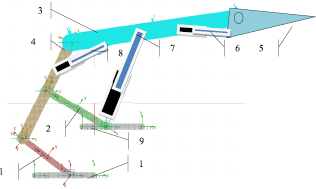
Рис. 3.1. Схема секции крепи
Adams – позволяет проектировать механизмы во взаимодействии их узлов и деталей и если рассмотреть одну деталь, то можно исследовать её влияние на соседние. Т. е. этот пакет можно отнести к средствам макромоделирования. [27, 28, 38]. Создание модели крепи. Открыв Adams (меню Adams View) и выбрав нужную систему единиц расчёта, нажмём ОК и из появившегося меню (рис. 3) выберем элемент Link – соединительное звено. Для создания элементов крепи используем элементы Link, масса которых зависит от установленных размеров и дается в режиме «по умолчанию». Конструктивно этот элемент предельно простой и представляет собой призму, поэтому для уточнённого моделирования силового взаимодействия узлов необходимо изменить их массу, а также моменты инерции по основным осям в соответствии с реальной конструкцией крепи. На рис. 3.2–3.4 этапы создания крепи с использованием вкладки Bodies. Слева мы обычно приводим меню пакета соответствующее моменту рассмотрения, что удобно при повторном использовании работы в целях обучения. Здесь основания имеют свойство «закрепления к земле», что в дальнейшем позволит присоединить к ним элементы шарнирного четырехзвенника (лемнискатного механизма). При создании звена достаточно отметить на экране его длину. По умолчанию ширина звена устанавливается в 10 % от длины, а толщина в 5 % от длины. Созданное звено имеет две красные точки. Одна из них позволяет изменять длину и ширину, а другая – длину и ориентацию в собственной плоскости. Для создания звена: на палитре инструментов выбрать его значок; на панели установок определить статус (например, grund или new part); указать, если необходимо значения длины ширины и толщины, отметив соответствующие флажки и задав значения. При построении со «свободными размерами» можно указать курсором место, где должно находиться звено, нажать левую кнопку и, не отпуская кнопки, двигать мышь в направлении длины до тех пор, пока звено не достигнет нужных размеров.
Вначале создадим элемент закреплённый к земле т. е. неподвижный, выбрав в первом окошке из меню статус grund (рис. 3.2) где вместо меню звена типа Link использовано меню линии Polyline. Далее можно ввести размеры элемента, хотя для «земли» это не важно. Теперь создадим ограждение и затем рычаги четырехзвенника, используя элемент Link, но теперь выбрав в первом окошке new part – новая деталь. Здесь же в меню устанавливаем размеры: длину, ширину (Lenght, width, depth), (рис. 3.3). При использовании Polyline устанавливалась длина и угол наклона линии Angle. Если хотим видеть модель в объёме, то нажимаем правый крайний кубик в самой верхней строке панели. Установки остальных элементов и рычагов производим по аналогии. На рис. 3.4 мы повернули конструкцию так, что бы она была в пространстве 3D. Наложенное окно даёт информацию о том, как ввести характеристики измененной в соответствии с параметрами реальной крепи массы и моментов инерции, которые являются основными элементами для характеристики предстоящего движения крепи (использована вкладка Bodies). Заметим, что почти все рисунки являются фотокопиями с экрана ПК. Проектирование производится с проверкой особенностей движения крепи, вначале от действия веса рассматриваемого звена (пока силы не прилагаем). Также отметим, что для данной крепи движение козырька при опускании параллельно забою (в данном случае вертикально). Именно в этом заключается одна из целей установки лемнискатного механизма. Для обеспечения такой траектории определены длины рычагов и расстояния между шарнирами. Это выполнено на VBA, см, раздел 1.2.
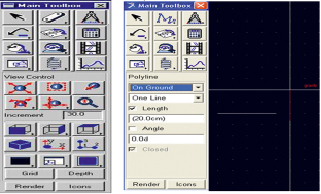
Рис. 3.2. Одна из панелей пакета
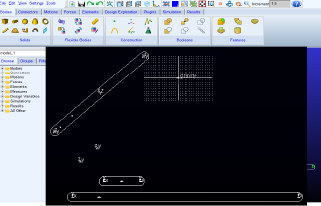
Рис. 3.3. Создание основания и ограждения крепи
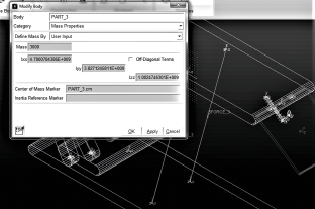
Рис. 3.4. Изменение массы ограждения
В построении, приведенном ниже, мы использовали уже оптимизированные размеры. В пакете Adams это выполнить затруднительно из-за необходимости перестройки схемы при каждом изменении размеров рычагов, что длительно и трудоёмко. Поэтому оптимизацию мы провели на основе собственной программы, воспользовавшись простыми операторами VBA в Excel и его графикой, когда меняя размеры в таблице можно сразу же получать траекторию нужной точки. В Adams применить кодирование сложнее, так как надо использовать командный файл на языке С. Кроме того следует иметь и альтернативное решение на основе которого можно провести проверочные расчеты. Поскольку Adams закрытая от изменений система и многие тонкости работы с ним доступны только разработчикам. На первых рисунках мы перетаскивали элементы типа Link, хотя можно было бы использовать более сложные примитивы типа Plate и др, но ход построения в общем бы был бы одинаков).
В 3D проектировании важным моментом является использование построения по основным точкам табличным способом (рис. 3.5). «Зацепив» примитив можно нажать в меню точку (см. стрелку), открыв меню на рис. 3.5–3.9. Нажатием кнопки, на которую указывает стрелка, получим таблицу. Указав мышкой на точку экрана можно получить её отображение в таблице, можно также увидеть использованные при построении точки. На рис. 3.11 добавляем пружину к козырьку.
Вкладку Simulation Control используем для уже спроектированной части узлов и деталей, а затем и всей секции крепи. Это лучше выполнить в рабочем диапазоне её движения, например при вынимаемой мощности пласта 3–4 м. с величиной смещения на 1–1,5 м.
Окно, имея интуитивно понятный интерфейс, позволяет управлять временем просмотра всех этапов движения.
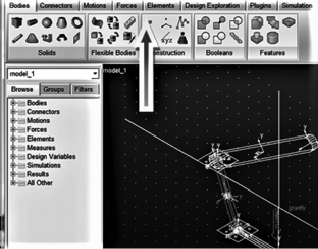
Рис. 3.5. Использование точек для построения фигур
На рис. 3.11 и 3.13 проверяя работу шарнирного соединения в движении, использовали наложенное окно Simulation Control. Перед этим, когда был установлен верхний и нижний ряд траверс, для создания шарнирного четырехзвенника использовали вкладку Connectors. Эта вкладка обеспечивает связи между элементами, шарниры, включая шаровые, поступательные связи и т. п. Щелкая левой клавишей мыши ЛКМ по пиктограмме шарнира (он напоминает дверную петлю), наводим курсор на рычаг, который хотим связать. После появления в окне его имени щелкнем ЛКМ, затем переводим курсор на основание и когда появится слово grund другого соединяемого элемента делаем очередной щелчок. Теперь остаётся перевести курсор в точку куда собирались вставить шарнир там появляется кружок, и после щелчка ЛКМ он превращается в изображение шарнира. То есть мы соединили рычаг траверсы с основанием. Понятно что можно соединять и два подвижных элемента Заметим, что пружина, вместо гидропатрона применена и для накопления опыта проектирования (рис. 3.10).

Рис. 3.6. Таблица для построения координат точек (для новых точек можно использовать кнопку Greate)
Пружина относится к силовым элементам и находится во вкладке Forces. Когда жесткости пружины будет не хватать для удержания конструкции начнётся просадка пружины. Пружина установливается по начальной и конечной точке. В отличии от реального случая сопротивление пружины будет возрастать тогда как в гидростойке оно должно быть постоянным [38]. Можно было бы решить задачу и по другому вставив вместо пружины жесткий элемент или постоянную силу.
Моделирование действия гидростоек можно провести, исходя из максимальной нагрузки срабатывания предохранительного клапана. В этом случае, с учетом изменения направления силы от гидростойки на перекрытие и основание, попытаемся использовать меню пакета для установки силы на две точки принадлежащие конструкции. Меню Two bodies (два тела) позволяет установить направление силы по двум точкам тел, между которыми действует сила. В этом случае направление силы постоянно меняется. Таким образом, мы сможем вычислять нагрузки крепи при её просадке под действием горного давления. Для использования меню следует войти во вкладку Forces, рис. 3.11, 3.12.
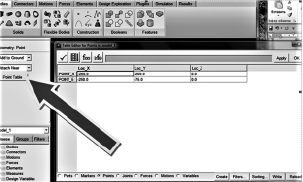
Рис. 3.7. Таблица точек при построении секции
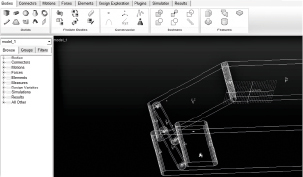
Рис. 3.8. Создание задней траверсы
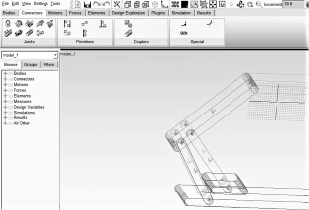
Рис. 3.9. Создание шарнирных соединений
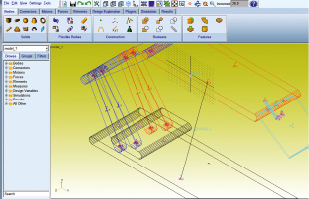
Рис. 3.10. Создание консоли и пружины имитирующей гидроцилиндр (гидропатрон) для поджатия консоли
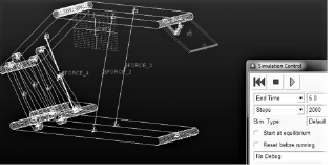
Рис. 3.11. Создание силы, имитирующей гидростоек перекрытия и ограждения и последующую симуляцию движения
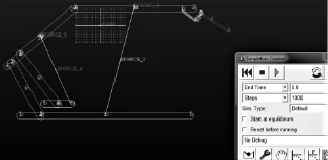
Рис. 3.12. Создание силы, имитирующей гидростойку перекрытия
Также выполним изменение силы на одной из гидростоек, что бы имитировать неравномерное нагружения секции. При симуляции движения на рис. 3.11, 3.14 линии, продолжающиеся за контуром крепи, указывают направления сил. После вычисления нагрузок в узлах секции крепи, используя Ansys, можно, исследовать прочностные возможности узлов, например, одной из траверс лемнискатного механизма включающей нижние или верхние рычаги, при их нессиметричном нагружении [26].
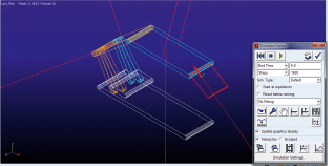
Рис. 3.13. Симуляция движения крепи
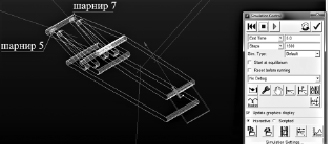
Рис. 3.14. Симуляция движения крепи, просадка четырехзвенника, отмечены шарниры, где будут строиться силы реакции (рис. 3.12)
Задание
Студентам рассмотреть диаграммы нагрузок в шарнирах 5 и 7 под воздействием асимметричной нагрузки и выявить отличия.
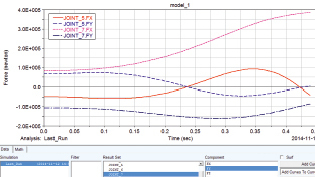
Рис. 3.15. Реакции в шарнирах 5 и 7 при симметричном нагружении