
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
2.3.2. Буксировки моделей подводного судна
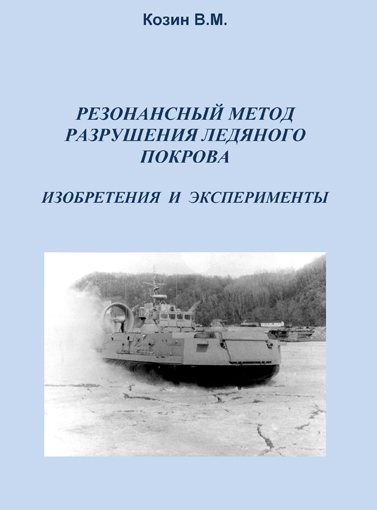
Исследования волнообразования в ледяном покрове при подледном движении подводного судна выполнялись в опытовом бассейне КнАГТУ с применением полимерной модели ледяного покрова (рис.2.80) [85].
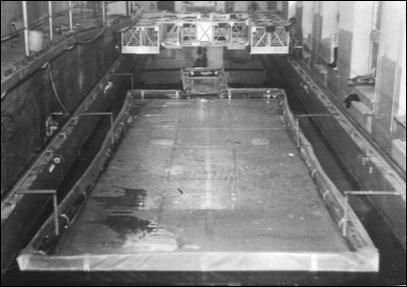
Рис.2.80.Общий вид полимерной модели сплошного льда
Эксперименты проводились для определения характеристик волн, возбуждаемых движением подводного судна, с целью оценки их ледоразрушающей способности, что необходимо при разработке новых технологий всплытия подводных судов во льдах большой толщины [87].
На первом этапе модельных исследований буксировка модели подводного судна (рис.2.81) производилась с применением буксировочной тележки опытового бассейна, а для измерения профилей ИГВ использовалась измерительная система на основе датчиков гидростатического давления.
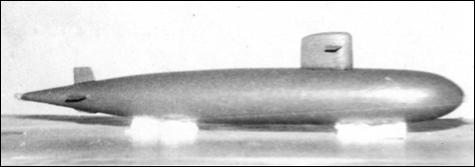
Рис.2.81.Модель 1 подводного судна
Рис.2.82.Стойки с блоками для проводки полубесконечного буксирного троса (а-передняя; б-задняя)
Буксировочная система для буксировки модели ПЛ под моделью ледяного поля с заданной скоростью движения и заглублением состояла из буксировочной тележки, рельсового пути и системы регулирования скорости движения тележки (рис.2.10). Натяжение буксирного троса осуществлялось с помощью груза, подвешиваемого на один из концов троса, перекинутого через блок, закрепленный на буксировочной тележке. Дополнительно изготовливались две рамы крепления с блоками для прохода буксирного троса (рис.2.82). Блоки крепились к вертикальной балке. Верхний блок крепился неподвижно, а крепление нижнего блока позволяло изменять его положение по вертикали.
Измерение амплитуд генерируемых волн от движущейся модели производилось с помощью гидростатических датчиков, установленных на втором дне (рис.2.71). При прохождении фронта волны от модели над датчиками изменение давления преобразовывалось в электрические сигналы, которые затем усиливались и передавались на самописец.
Рис.2.83.Фрагмент буксировки модели под модельным ледяным покровом
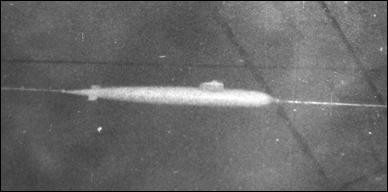
Рис.2.84.Буксировка модели подводного судна
Для того, чтобы момент прохождения модели подводного судна над датчиком фиксировался самописцем, на буксировочной тележке (рис.2.83) устанавливался магнит, а в месте установки датчиков на планшире бассейна - геркон. Буксировки модели проводились при скоростях 0,5 - 1,5 м/с, заглублениях h0/ L = 0,20 - 0,35 и глубине воды H/ L = 0,7 - 1,0 (рис.2.84). Устройство модели подводного судна показано на рис.2.85. Запись профилей ИГВ выполнялась на различных удалениях от линии движения модели за единичный ее проход (рис.2.84). Типовые записи профилей модельных ИГВ показаны на рис.2.86.
Рис.2.85.Схема устройства модели подводного судна: 1- корпус; 2- носовой кронштейн; 3 - твердый балласт; 4 - осевой стержень, соединяющий кронштейны между собой; 5 - ограждение выдвижных устройств; 6 - кормовой кронштейн
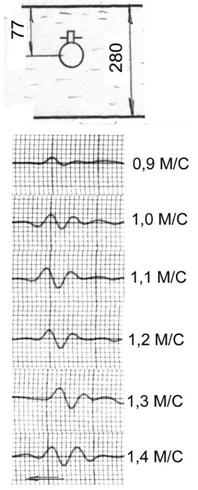
Рис.2.86.Профили модельных ИГВ над моделью подводного судна
Исследования показали, что амплитуда возбуждаемых волн в большей степени зависит от глубины воды, нежели от заглубления модели. Из-за трудностей, возникших при тарировке датчиков давления измерительной системы, была получена лишь качественная картина процесса волнообразования, поскольку были определены только относительные амплитуды ИГВ. Более того, такая схема запряжки модели не позволяла производить оценку сопротивления движению модели.
Тем не менее, исследованиями была продемонстрирована принципиальная возможность разрушения сплошного льда резонансными ИГВ от движения подводного судна.
В первом приближении можно было считать, что при глубине погружения подводного судна, равной трети его длины и скорости хода 20- 30 узлов можно было ожидать разрушения ледяного покрова толщиной более одного метра при водоизмещении судна 3500 т.
На втором этапе для количественной оценки параметров волнообразования в полимерном льду была спроектирована и изготовлена универсальная буксировочная система гравитационного типа; разработана оснастка для проведения опытов; создана измерительная система повышенной чувствительности для регистрации колебаний модельного льда на основе электромеханического датчика перемещений (рис.2.25) и двухкоординатного самописца Endim 622.01 (рис.2.17), что позволяло определять сопротивление движению моделей (рис.2.87).
Рис.2.87.Схема оснастки и оборудования для проведения модельного эксперимента: 1- опытовый бассейн; 2 - рама с подвижной балкой и блоками проводки; 3 - ведущий блок с приводным барабаном; 4 - верхняя подвеска; 5 - гак с подвешенным грузом; 6 - приводной трос; 7 - бесконечный буксирный трос; 8 - модель ледяного поля; 9 - модель подводного судна; 10 - датчик перемещений; 11 - самописец; 12 - частотомер; 13 - блок натяжки; 14 - датчик регистрации световых импульсов
Для имитации ледяного покрова использовалась модель неразрушаемого сплошного льда из полимерного материала - поливинилхлоридного пластиката. Среднее значение его модуля упругости было равно 20 МПа, что позволило проводить модельные исследования в масштабе 1/150 - 1/250 (меньший масштаб соответствовал морскому льду).
В качестве среднего значения масштаба был принят масштаб 1/200, соответственно, моделировался ледяной покров толщиной 0,2 м. Габаритные размеры полимерной модели сплошного льда составляли L´B=10,5´3,5м.
В процессе буксировки модели 1 подводного судна определялась скорость ее движения под модельным льдом и под поверхностью воды (0,5 - 2,3 м/с) в диапазоне относительных глубин погружения модели h0 / L = 0,19 - 1,0, при помощи измерительной системы (рис.2.89) записывались профили волн (рис.2.90) на различных удалениях от линии движения модели 1 и определялось полное сопротивление движению модели подводного судна.
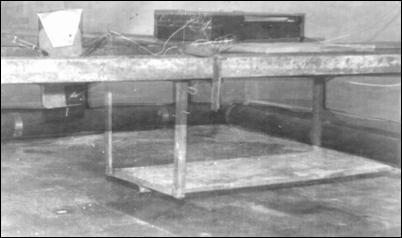
Рис.2.88.Измерительная система на основе электромеханического датчика перемещений
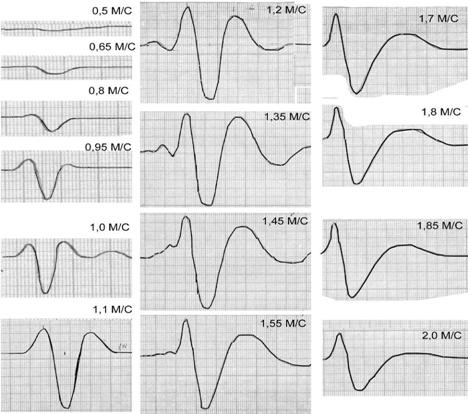
Рис. 2.89.Типовые записи профилей ИГВ второго этапа (h0 / L = 0,19)
Величина буксировочного сопротивления определялась взвешиванием подвесных грузов после пробега модели. Волновая составляющая полного соп-ротивления выделялась путем вычитания из ее значения величины полного сопротивления, определенного при движении модели подводного судна на большой глубине погружения.
На рис.2.90 представлена картина волнообразования в сплошном льду при движении модели подводного судна с критической скоростью, а на рис.2.91 - профили ИГВ в полимерном льду при различных относительных скоростях движения подводного судна [84] после пересчета их на натуру.
Рис.2.90.Картина волнообразования в сплошном льду при движении модели подводного судна с критической скоростью
Рис.2.91.Профили ИГВ при различных скоростях движения модели
Буксировочные испытания модели подводного судна под поверхностью воды (рис.2.92) проводились как для отработки методики проведения опытов, так и для отладки измерительного комплекса. Данные буксировок моделей использовались для сравнительного анализа в исследованиях движения подводного судна подо льдом. Буксировки модели 1 были выполнены при относительных скоростях Fr=0,3-1,0 и относительных глубинах погружения модели h0/L=0,2-1,0.
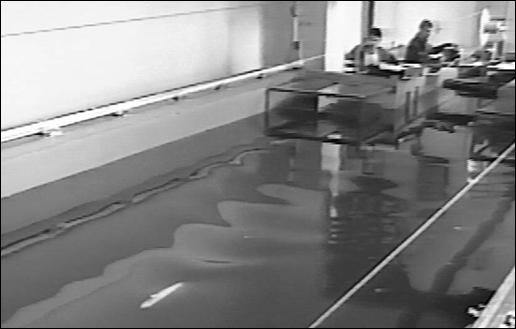
Рис. 2.92.Буксировка модели подводного судна на чистой воде
Для третьего этапа испытаний были изготовлены дополнительные модели подводного судна, геометрически подобные модели 1, но большего водоизмещения. Все модели подводного судна были изготовлены в масштабе 1/200. Экспериментальные исследования третьего этапа выполнялись на оборудования и оснастке предыдущего этапа. Их цель состояла в исследовании зависимости параметров ИГВ от скорости, заглубления, размеров подводного судна, а также в оценке ледоразрушающих возможностей подводных судов после пересчета данных модельных испытаний на натуру по известным критериям [87].
Программа буксировочных испытаний моделей 1-3 подводного судна (рис.2.93) под модельным льдом была нацелена на исследование влияния размеров подводного судна на параметры возбуждаемых волн - скорость, период и амплитуду ИГВ, а также волновое сопротивление. Буксировки моделей осуществлялись под полимерным модельным льдом при относительных заглублениях корпуса hО/L=0,2-0,7 (h0 - глубина погружения модели, отсчитываемая от продольной оси корпуса). На рис.2.94 представлен фронт ИГВ в модельном ледяном покрове при буксировке модели 2 подводного судна.
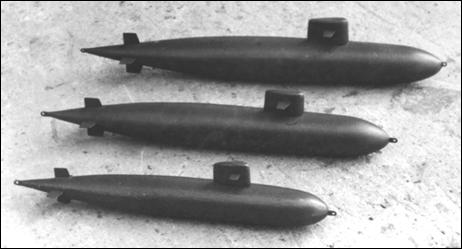
Рис.2.93.Модели 1-3 третьего этапа
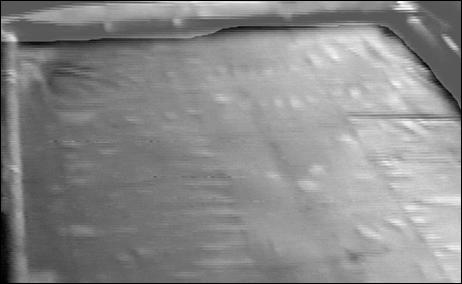
Рис.2.94.Прохождение фронта ИГВ в полимерном льду
При проведении буксировочных испытаний исследовалась зависимость амплитуды возбуждаемых ИГВ в сплошном льду от скорости хода моделей подводного судна на глубокой воде (рис.2.95), на мелководье и ее изменение по фронту волны. Записи профилей волн производились при помощи измерительной системы, представленной на рис. 2.96.
Анализ затухания модельных ИГВ, выполненный по записям профилей волн показал, что полимерный лед обладает вязко-упругими свойствами, близкими к натурному льду.
Буксировки моделей подводного судна под полимерным льдом по сравнению с моделями СВП показали особенности проявления ИГР в сплошном льду, характеризовавшегося ИГВ наименьших периода и амплитуды [88].
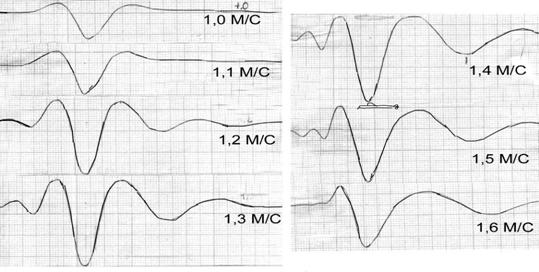
Рис.2.95.Типовые записи профилей модельных волн третьего этапа экспериментальных исследований
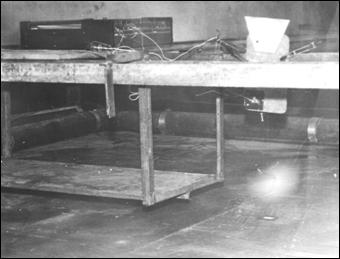
Рис.2.96.Общий вид оснастки измерительной системы
Волновое сопротивление оценивалось по результатам буксировок моделей подводного судна под полимерным сплошным льдом (рис.2.97) и на чистой воде для разных глубин фарватера [88]. Для возможности проведения сравнительного анализа были выполнены буксировки моделей на чистой воде различной глубины.
Данные испытаний моделей подводного судна под поверхностью воды использовались для сравнительного анализа в исследованиях движения подводного судна под сплошным и битым льдом. Буксировки трех моделей выполнялись при относительных скоростях Fr=0,3-1,0 и относительных глубинах погружения h0/L=0,2-1,0. Результаты буксировок моделей подводного судна под поверхностью воды была подтверждена пригодность малых моделей для исследования волнообразования и волнового сопротивления подводного судна.

Рис.2.97 Буксировка модели подводного судна под модельным льдом
По результатам буксировок моделей подводного судна были получены зависимости амплитуд, периодов и длин гравитационных волн от скорости движения моделей на разных глубинах погружения. Их анализ показал, что наибольшая амплитуда волн и максимальное значение коэффициента волнового сопротивления достигались при относительных скоростях Fr » 0,5, что соответствует традиционным представлениям о характере изменения волнового сопротивления.
Программа четвертого этапа буксировочных испытаний моделей подводного судна под модельным льдом состояла в исследовании влияния удлинения корпуса моделей (модели 2 и 4), имевших равное водоизмещение и общую полноту корпуса, но разные удлинения корпуса - 8 и 10, соответственно (рис.2.98).
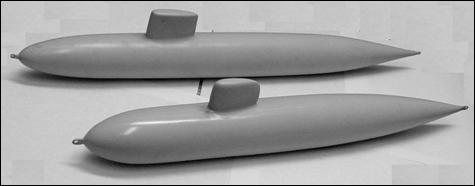
Рис.2.98.Модели четвертого этапа
На данном этапе модельных экспериментов исследовалось влияние удлинения корпуса подводного судна на параметры возбуждаемых волн (рис.2.99). По результатам расчета изгибных напряжений во льду оценивалось его влияние на ледоразрушающие возможности судна. Опытным путем было установлено, что увеличение удлинения корпуса приводило к падению интенсивности волн, т.е. к снижению уровня напряжений в ледяном покрове [160].

Рис.2.99.Оснастка для возбуждения модельных ИГВ при буксировке модели подводного судна под полимерным льдом
На пятом этапе модельного эксперимента исследовалась возможность идеализации обводов корпуса подводного судна, т.е. замена корабельных обводов корпуса на аналитические в целях упрощения процедуры его математического описания при создании расчетных моделей, например: эллипсоидом вращения. Для буксировок использовались модели 2 и 5 (рис.2.100). Для этого модель 5 была выполнена в виде эллипсоида вращения с удлинением корпуса равным 8. Как показали буксировки моделей подводного судна, существенное видоизменение обводов корпуса подводного судна практически не сказывалось на параметрах ИГВ при заглублениях корпуса от h0 /L>0,2 .
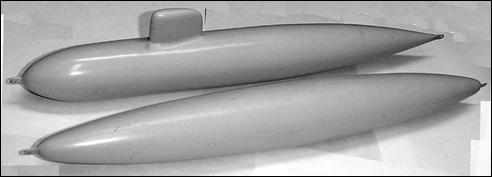
Рис.2.100.Модели пятого этапа
Нестационарное движение модели подводного судна под полимерным сплошным льдом моделировалось в ходе экспериментов шестого этапа: модель двигалась в режиме торможения, либо с разгоном с постоянным ускорением. Для буксировки моделей подводного судна буксировочная система оснащалась электроприводом (рис.2.101).
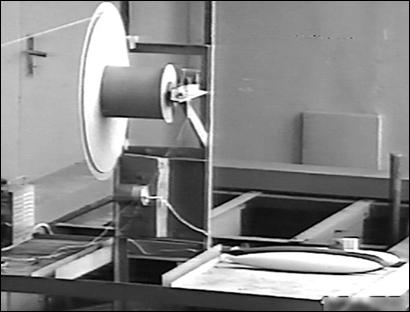
Рис.2.101.Ведущий блок с электроприводом
Было замечено, что при движении модели подводного судна с резонансной скоростью в модельном льду распространялись волны существенной амплитуды, но с заданием ускорения разгона или торможения интенсивность ИГВ во льду падала. Причем при разгоне амплитуда возбуждаемых моделью волн падала более сильно.
На седьмом этапе, так же, как и в опытах с моделью СВП, исследовалось влияние торосов на распространение ИГВ в сплошном ледяном покрове. Торосы также имитировались лентами из полимерного материала, которые укладывались либо вдоль, либо поперек линии движения нагрузки. На рис.2.102 представлен общий вид лабораторного оборудования для проведения модельных опытов.
Буксировки модели 2 подводного судна производились с различными скоростями и заглублениями корпуса как на глубокой воде, так и на мелководье (рис.2.103). Определялись амплитуда, период и скорость ИГВ, оценивалось волновое сопротивление модели подводного судна при различных схемах расположения торосов на модельном льду.
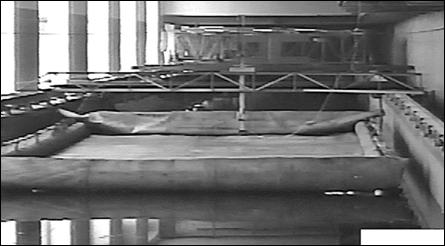
Рис.2.102.Модель сплошного ледяного покрова

Рис.2.103.Подготовка буксировочных испытаний модели подводного судна
Основные закономерности распространения ИГВ в заторошенном модельном льду были такие же, как и в опытах с роликом.
Исследования взаимодействия подводного судна с полубесконечным ледяным покровом выполнялись в ходе восьмого этапа модельных исследований на основе модели неразрушаемого полубесконечного сплошного льда из полимерного материала. Первая серия восьмого этапа модельных экспериментов выполнялась на модели полубесконечного ледяного покрова с продольным расположением свободной кромки льда вдоль линии движения модели подводного судна (рис.2.25). На рис.2.104 показан датчик перемещений, установленный возле продольной кромки полубесконечного ледяного поля.
|
|
|
|
|
Рис.2.104.Датчик перемещений, установленный возле продольной кромки полубесконечного ледяного поля |
Рис.2.105.Заныривание модели подводного судна под кромку модельного льда |
|


Поперечное расположение свободной кромки модели полубесконечного сплошного льда относительно линии движения модели судна было во второй серии экспериментов (рис.2.105). Буксировки модели подводного судна выполнялись под свободной кромкой модельного сплошного льда и на различных отстояниях от нее, как в сторону воды, так и в сторону льда. В опытах второй серии производилось заныривание модели под модельный лед. При испытаниях модели 2 подводного судна были получены характеристики волн в полубесконечном ледяном покрове при различных скоростях движения модели, заглублениях корпуса модели и глубинах акватории [159].
В ходе буксировок модели подводного судна под модельным полубесконечным ледяным покровом было установлено, что деформации ледяного покрова были наибольшими при движении под кромкой льда. Максимум амплитуд ИГВ наблюдался при скорости движения модели, меньше резонансной.
Анализ режимов распространения ИГВ в модельном льду позволил уточнить традиционные представления об ИГР в ледяном покрове, вытекающие из аналитических решений. Основное уточнение представления о резонансном волнообразовании и разрушении ледяного покрова состояло в том, что при ИГР увеличение амплитуд волн было меньше, чем при волноводном режиме. При этом возрастание амплитуд происходило при меньших длинах и периодах ИГВ. Вследствие этого, напряжения во льду достигали максимума именно при резонансных скоростях. Возможно, поэтому разрушение сплошного льда резонансными ИГВ в натурных условиях происходит наиболее эффективно [91]. Следовательно, дальнейшие исследования ИГР необходимо было сосредоточить на изучении резонансного режима волнообразования в сплошном льду [160].
Результаты модельных экспериментов с использованием неразрушаемой модели сплошного льда использовались в качестве исходной базы для организации опытов по моделированию ледоразрушающей способности ИГВ в рамках моделей разрушаемого ледяного покрова [160].
Модельные исследования девятого этапа проводились без использования модели ледяного покрова, так как все буксировки геометрически подобных моделей подводных судов в масштабах М 1:80 - 1:200 были выполнены на чистой воде: как на глубокой, так и на мелководье (рис..2.111). Выбор масштабов моделей подводного судна был продиктован необходимостью выявления масштабного эффекта при выполнении модельных опытов.
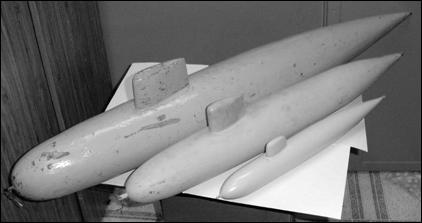
Рис.2.106.Модели девятого этапа
Цель буксировочных испытаний девятого этапа состояла в определении значений амплитуд гравитационных волн, возбуждаемых движением моделей подводного судна в зависимости от их скорости хода и условий акватории. На основании полученных данных, был выполнен расчет ледоразрушающих свойств ИГВ [163].
Пересчетом на натуру результатов модельных экспериментов и их сопоставлением с известными экспериментальными данными было установлено слабое влияние масштабного эффекта на параметры гравитационных волн, возбуждаемых разномасштабными моделями подводного судна, а также удовлетворительное соответствие методики проведения экспериментов и добротность измерительного оборудования [139].
В дальнейшем крупномасштабные модели подводного судна применялись в экспериментальных исследованиях на естественном модельном льду в натурных условиях.