
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
1.3.3.Активные АБУ
АБУ Сирла содержит балансировочную камеру, разделенную на несколько отсеков, в которые из резервуара через систему каналов и лопаток направляется балансировочная жидкость, расход которой регулируется в зависимости от величины прогиба и вектора дисбаланса ротора [28, 29]. Недостатком подобных АБУ является возможность его использования только в машинах с вертикальной осью вращения. Из-за необходимости перекрытия впускных отверстий и трения между распределительным диском и питающей обоймой в АБУ после балансировки остается значительный остаточный дисбаланс. Жидкость после балансировки не возвращается в резервуар, что требует ее излишков.
АБУ с отводными трубками состоит из двух, соосных оси шпинделя, балансировочных камер, установленных в плоскостях коррекции [133]. Сами камеры разделены на отсеки с помощью перегородок для избежания перемещения жидкости по длине обоймы. Рядом со шпинделем находятся два насадка с клапанами для поступления балансировочной жидкости. Жидкость подводится в две распределительные обоймы. Распределительную обойму в верхней плоскости измерения соединяют с отсеками балансировочной камеры в нижней плоскости и наоборот. Насадки установлены вне шпинделя и при поступлении жидкости она попадает в распределительные обоймы, в которых она распределяется так, что ее свободная поверхность становится параллельной оси шпинделя. При этом наиболее удаленные от оси концы отводных трубок затапливаются и балансировочная жидкость попадает через соединительные трубки в противоположенные дисбалансу отсеки. С помощью соответствующего соединения отсеков с отводными трубками на распределительной обойме можно регулировать угол запаздывания прогиба от вектора дисбаланса. Данное АБУ автоматически балансирует шпиндель в заранее выбранном диапазоне поле скоростей: либо до первой, либо между первой и второй критическими скоростями. Для работы устройству необходимы источник избыточной жидкости и насос для ее подачи. Трубки, соединяющие распределительные обоймы с отсеками, накладывают ограничения на конструкцию шпинделя.
Устройства силового воздействия на шпиндель не устраняют дисбаланс, а только создают силовое поле, компенсирующее результат его действия на вращающийся шпиндель [133]. В данном устройстве на шпинделе машины монтируются электромагниты, способные создавать силовое воздействия на вращающийся шпиндель путем изменения напряжения на их обмотках. В опорах шпинделя находятся датчики вибрации, передающие данные на вычислительный блок, который через программу управляет напряжением на контактах электромагнитов. Результирующий вектор электромагнитных сил компенсирует дисбаланс шпинделя. Недостатком подобных АБУ является то, что при устранении вибрации на опорах уровень напряжений у шпинделя остается прежний. Также можно отметить их энергоемкость, требующую создания силового магнитного поля для компенсации центробежных сил.
АБУ с принудительным перемещением КМ служат для балансировки шпинделей во всем диапазоне скоростей вращения. Устройства данного типа состоят из исполнительного механизма, перемещающего КМ, и блока автоматического управления [30, 78, 135, 136 и др.]. В таких АБУ устранение дисбаланса происходит автоматически без вмешательства оператора в зависимости от уровня вибрации опор или другого параметра, связанного с неуравновешенностью шпинделя. В качестве КМ здесь выступают маятники, кольца, шары, жидкость, и др. Блок автоматического управления КМ делятся на четыре типа [78, 133]:
- действующие по методу случайного поиска;
- следящие системы;
- системы экстремального регулирования по методу градиента;
- системы экстремального регулирования по методу Гаусса – Зайделя.
Принцип работы АБУ поясняется рис. 1.4. Во время процесса балансировки кольцевая КМ 17, лежащая на двух парах пружин 15 и 16, перемещается по двум взаимно перпендикулярным направлениям. Перемещение КМ во время балансировки осуществляется с помощью двуплечих рычагов 2, с которыми соприкасаются концентричные чашки 3 и 4, перемещаемые вдоль оси шпинделя 14 винто-рычажными механизмами 5 и 6. Электродвигатели 7 и 8 для перемещения чашек смонтированы на кронштейне 9, закрепленного на кожухе 1 шлифовального круга 10. Каждый из электродвигателей работает поочередно в течение 15 с. Амплитуду вибрации шпинделя регистрируют с помощью датчика 11, шток 12 которого перемещается от закрепленного на шпинделе кольца 13. Датчик связан с усилителем и выпрямителем, выходной сигнал которых управляет вращением электродвигателей.
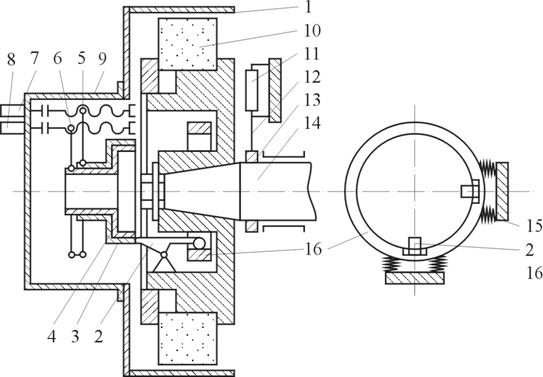
Рис. 1.4. Устройство для балансировки шлифовального круга
Так же известно устройство, состоящее из установленного на шпиндель балансирующего диска, центр тяжести которого может перемещаться относительно оси вращения посредством гидравлической системы [78, 113]. Гидравлическая система позволяет дистанционно управлять балансировкой шлифовального круга путем смещения балансирующего диска относительно шпинделя при помощи специального устройства, увеличивающего давление в камерах противоположенных дисбалансу.
В работах [125, 128] приведены типовые конструкции АБУ шпиндельных узлов с управлением перемещений корректирующих дисков от гидродинамической опоры. Оно работает по двухступенчатому балансировочному циклу следующим образом (рис. 1.5.).
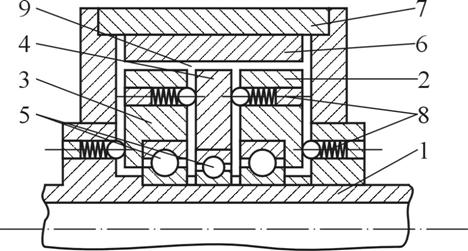
Рис. 1.5. Шпиндельный узел с АБУ с использованием гидродинамической опоры
На шпиндель 1 установлены основные балансировочные неуравновешенные диски 2 и 3, а также дополнительный корректирующий диск 4, неуравновешенность которого равна остаточному дисбалансу после балансировки основными дисками. Диски установлены с помощью подшипников 5 на шпинделе, создавая зазор δ относительно гидродинамической опоры 6, связанной с корпусом 7. Угловые положения всех дисков относительно друг друга и шпинделя зафиксированы устройствами 8. Полость 9 заполнена полностью вязким веществом. Во время вращения при наличии неуравновешенности на шпинделе последний с дисками отклонится в сторону неуравновешенности и зазор δ уменьшится, что вызывает повышение тормозных сил между опорой и дисками. Когда эти силы превысят усилия фиксирующих устройств, то диски будут поворачиваться относительно шпинделя и относительно друг друга за счет различия их формы на периферийной поверхности. При повороте дисков 2 и 3 относительно шпинделя реализуется первая (грубая) ступень балансировки, а при повороте диска 4 относительно дисков 2 и 3 – вторая (более точная).
Известны АБУ, устанавливаемые в опорах и работающие по принципу смещения шпинделя навстречу усилиям в опорах с помощью гидравлического устройства принудительного центрирования до тех пор, пока не происходит полное совпадение главной центральной оси инерции с осью его вращения [78]. Данное смещение эквивалентно внесению распределенных уравновешивающих грузов по всей длине шпинделя. Внесение грузов производится по трапециидальному закону, что позволяет устранить реакции опор и частично снизить прогибы и напряжения на шпинделе. АБУ этого типа разделяются по методу действия на опоры шпинделя на несколько подгрупп: гидравлические, пневматические и механические.
Существует пассивное балансировочное устройство, работающее по данному принципу, но его можно устанавливать только на устройства, не изменяющие свой эксплуатационный дисбаланс, так как оно устраняет неуравновешенность однократно, используя в своем составе полимеризующиеся связующие в жидком состоянии [143]. Усовершенствовать данное АБУ можно путем применения легкоплавкого вещества вместо полимеризующихся связующих, что позволяет производить балансировку шпинделя многократно [47, 48].