
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
2.2.Общее уравнение колебаний неуравновешенного шпинделя с кругом
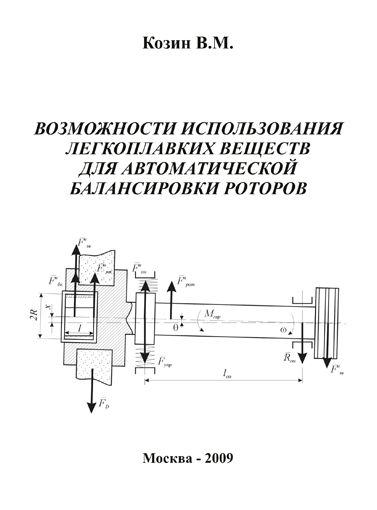
Поведение вращающейся неуравновешенной системы рассмотрено на примере вынужденных колебаний линейной системы с одной степенью свободы, без учета гироскопического эффекта [8, 14]. Жесткость шпинделя примем равной с, массу системы – m , при этом шлифовальный круг расположим посередине шпинделя. Опоры шпинделя будем считать абсолютно жесткими, а движение – установившимся. Колебания зададим внешней силой, изменяющейся по гармоническому закону и зависящей от угловой скорости w вращения неуравновешенной массы. Тогда ее проекцию на ось Х можно записать в виде:
| | (2.12) |
На шпиндель также будут действовать центробежная сила от вращения изогнутой оси шпинделя с прогибом x в месте крепления круга и восстанавливающая сила упругости пропорциональная отклонению оси шпинделя от оси вращения. Силы трения a будем считать прямо пропорциональными скорости ![]() . Тогда дифференциальное уравнения движения неуравновешенной системы под действием знакопеременной вынужденной нагрузки будет иметь вид:
. Тогда дифференциальное уравнения движения неуравновешенной системы под действием знакопеременной вынужденной нагрузки будет иметь вид:
| | (2.13) |
После подстановки wкр2 = с / m и n = a / 2m (где n – коэффициент сопротивления колебаниям) и (2.12) в (2.13) получим:
| | (2.14) |
Общее решение данного уравнения получено из суммы общего и частного решений однородного уравнения ![]() . Очевидно, что решение уравнения будет зависить от соотношения между n и wкр. В частности, когда n < wкр (случай малого сопротивления, являющийся основным для шпинделей) решение уравнения будет иметь вид:
. Очевидно, что решение уравнения будет зависить от соотношения между n и wкр. В частности, когда n < wкр (случай малого сопротивления, являющийся основным для шпинделей) решение уравнения будет иметь вид:
| | (2.15) |
где: e – угол запаздывания;
А – амплитуда колебаний.
Для определения постоянных интегрирования воспользуемся начальными условиями: ![]() . Неизвестные в выражении (2.15) определяются из равенств:
. Неизвестные в выражении (2.15) определяются из равенств:
| | (2.16) |

Первые два члена в уравнении (2.15) характеризуют колебания системы с собственной частотой, зависят от начальных условий и параметров системы. Затухающий характер этих колебаний (члены содержат множитель e–nt) позволяет ими пренебречь, т.е считать, что система по истечении некоторого времени будет совершать только вынужденные колебания. Таким образом, уравнение (2.15) можно упростить до вида:
| | (2.17) |
Это уравнение будет описывать колебания рассмотренной системы при указанном выше соотношении между n и wкр. Анализируя уравнение (2.17), можно сделать несколько выводов:
- вынужденные колебания всегда происходят с частотой ω возмущающей силы и не зависят от сопротивления в системе n;
- амплитуда вынужденных колебаний не зависит от времени и начальных условий (максимальное значение она достигает до резонанса, при ![]() ;
;
- поскольку в шпинделях металлообрабатывающих станков существуют силы трения, то при колебаниях будет иметь место угол запаздывания между фазой возмущающей силы и фазой колебаний;
- величина n ограничивает амплитуду колебаний (зависимости для определения этого коэффициента можно найти в [30, 141]).
Графики зависимостей e = f(w) и A=f(w) представлены на рис. 2.1.
При проектировании АБУ и выводе основных уравнений часто принимают допущение, что угол запаздывания между дисбалансом и прогибом шпинделя на докритических частотах принимают нулю, а свыше критических – 180°. Это справедливо лишь для случая когда n = 0 (в системе отсутствует внешнее и внутреннее трение). В действительности имеет место плавная зависимость между углом запаздывания и относительной скоростью вращения.
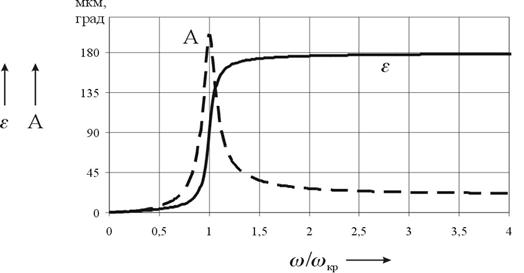
Рис. 2.1. Зависимость амплитуды колебаний и угла запаздывания от относительной скорости вращения.