
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания

ЭНЕРГОЭФФЕКТИВНЫЕ СИСТЕМЫ ГИДРАВЛИЧЕСКИХ ПРИВОДОВ ШАГАЮЩИХ МАШИН: МОНОГРАФИЯ
Семенов С. Е., Щербачев П. В., Тарасов О. И.,
ПРИВОД ШАГАЮЩЕЙ МАШИНЫ В УСЛОВИЯХ АВТОНОМНОГО ПИТАНИЯ
В современной автономной малогабаритной робототехнике, в которой источником энергии является электрический аккумулятор, наиболее распространены приводы мощностью до 500 Вт с жесткими ограничениями по габаритным характеристикам и требованиями обеспечения максимально возможного значения КПД. На данный момент лучшими показателями КПД, при равных массогабаритных параметрах, обладают индукторные электродвигатели. Степень их интеграции в область приводов насосов возрастает с каждым годом [30]. Для достижения этих показателей требуется построение специальной системы управления [28, 30]. Кроме того, в большинстве случаев, невозможно подобрать электродвигатель так, чтобы скорость и момент на его валу соответствовали требуемым на исполнительном устройстве. Для согласования этих параметров используют редукторы различных типов. Наиболее распространенными на сегодняшний день являются электромеханический и электрогидравлический привод, принципиальные схемы которых представлены на рис. 3.
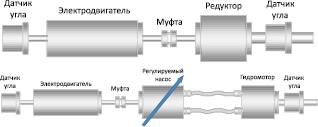
Рис. 3. Варианты схем поворотных приводов
При этом все чаще возникает необходимость движения исполнительного звена по какой-либо траектории с минимальными отклонениями от заданных. Наилучшим методом для обеспечения данной функции является построение следящего по положению привода. Целью данной работы является рассмотрение различных типов редукторов и обоснование критерия выбора параметров электродвигателя и редуктора для построения энергоэффективного привода, а также рекомендации по построению системы управления приводом на основе гидростатической передачи.