
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания

ЭНЕРГОЭФФЕКТИВНЫЕ СИСТЕМЫ ГИДРАВЛИЧЕСКИХ ПРИВОДОВ ШАГАЮЩИХ МАШИН: МОНОГРАФИЯ
Семенов С. Е., Щербачев П. В., Тарасов О. И.,
Описание механической передачи
В состав гидравлической передачи входят аксиально-поршневой насос TFH-080 фирмы Takako и поворотный гидродвигатель.
Для определения КПД гидроквадранта необходимо рассчитать утечки по зазорам между сопрягаемыми деталями. Схема для расчета утечек показана на рис. 17.
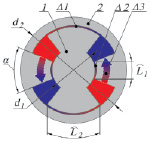
Рис. 17. Схема для расчета утечек в гидроквадранте
Красным цветом показаны полости с высоким давлением, синим – полости с низким давлением. Выноской 1 обозначен поворотный разделяющий элемент, выноской 2 – корпус с секторами. Утечка жидкости происходит в радиальных зазорах Δ1 и Δ2, а также в торцевых зазорах Δ3 (показано белыми пунктирными стрелками). Ширина рабочей камеры квадранта равна B.
Величина утечки в малом зазоре может быть рассчитана по формуле:
 (15)
(15)
|
где Δp – |
перепад давлений, под которым происходит утечка; |
|
B – |
ширина зазора; |
|
Δ – |
величина зазора; |
|
μ – |
динамический коэффициент вязкости рабочей жидкости; |
|
L – |
длина зазора. |
Утечка в зазоре Δ1 определяется следующим образом:
 (16)
(16)
Утечка в зазоре Δ2 определяется следующим образом:
 (17)
(17)
В зазоре Δ3 ширина переменная, поэтому необходимо проинтегрировать:
 (18)
(18)
Перепад давлений в полостях определяется моментом на выходном валу (обозначения величин приведены на рис. 17):
 (19)
(19)
Расход жидкости через гидродвигатель зависит от скорости вращения выходного вала:
 (20)
(20)
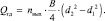
КПД насоса взят из заявленным производителем характеристик [38]. На рис. 18 точками показаны табличные данные, а сплошной линией – их аппроксимация степенной функцией.
Целесообразно применить регулируемый насос для достижения плавного изменения суммарного передаточного отношения. В этом случае нужно ввести величину – параметр регулирования:
 (21)
(21)
|
где V0 – |
текущий рабочий объем насоса; |
|
V0max – |
максимальный рабочий объем насоса. |
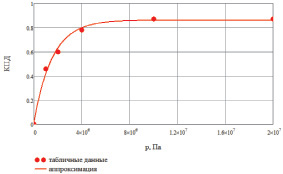
Рис. 18. КПД насоса
С учетом параметра регулирования и КПД насоса выражение для момента на валу насоса запишется следующим образом:
 (22)
(22)
Скорость вращения вала электродвигателя равна скорости вращения вала насоса и определяется необходимой подачей гидродвигателя и утечками:
 (23)
(23)
где ηоб – объемный КПД насоса.
Электродвигатель был описан выше соотношениями (7)–(12).
Суммарный КПД передачи запишем в виде:
 (24)
(24)
На рисунках представлены поля характеристик при значениях параметра регулирования ε = 1, ε = 0,75 и ε = 0,32, что соответствует передаточным отношениям i = 6, i = 9, i = 21.
Рис. 19. Поле характеристик при ε = 1
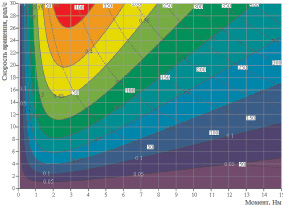
Рис. 20. Поле характеристик при ε = 0,75
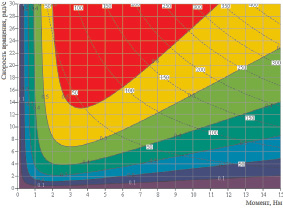
Рис. 21. Поле характеристик при ε = 0,32
Анализируя представленные на рис. 14, 15, 16, 19, 20, 21 характеристики, можно сделать вывод, что в целом гидравлическая передача несколько уступает по КПД (на величину до 10 %) механической в области малых моментов и примерно равна ей в области больших моментов.
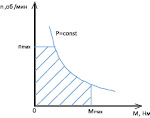
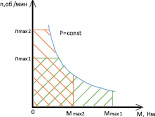
В робототехнике нередки проблемы, связанные с заклиниванием каких-либо устройств в процессе передвижения, что ведет к резкому возрастанию усилия на исполнительном механизме. Так же возможна иная ситуация, когда необходимо без нагрузки быстро переместиться до какого-либо объекта, выполнить операции с высокой нагрузкой, и без нагрузки вернуться в исходное положение. Для подобных задач с использованием механического редуктора одним из вариантов решения будет установка электродвигателя заведомо более мощного, способного перекрыть весь диапазон нештатных моментов и скоростей, которые не требуются в номинальном режиме работы привода. Вторым вариантом будет установка после редуктора коробки передач, что еще сильнее снизит КПД системы и существенно увеличит ее габаритные размеры и массу. Этого недостатка лишена гидравлическая передача на основе регулируемого насоса. При этом габаритные размеры нерегулируемого и регулируемого насоса мало отличаются друг от друга [23]. Изменяя рабочий объем насоса Vн0 можно быстро и плавно менять передаточное отношение электрогидравлической передачи, что существенно расширит диапазон рабочих режимов. На рис. 22 представлены графики выходной мощности в координатах частота вращения и момент на входном валу гидропередачи. На рис. 22(а) видно, что рабочий диапазон передачи с одним передаточным числом (область, заштрихованная синим цветом) ограничен максимальным значением частоты вращения и максимальным моментом, которые определяются величиной коэффициента редукции, и максимальной мощностью электродвигателя. На рис. 22(б) представлены области, для двух значений коэффициентов редукции: высокого (зеленая область) и низкого (оранжевая область). Это наглядно демонстрирует расширение рабочего диапазона передачи с переменным значением коэффициента редукции, по сравнению с постоянным.
а б
Рис. 22. Диапазон рабочих режимов для:
а – привода с неизменяемым передаточным отношением;
б – привода с изменяемым передаточным отношением
В случае гидравлической передачи изменение передаточного числа можно осуществлять нижеописанными способами.
Для случая в котором необходимо ограниченное количество передаточных чисел гидропередачи и регулирование осуществляется дискретными приводами, в системе управления можно менять коэффициент kгп в соответствии с управляющими воздействием (рис. 23). К примеру, если в системе необходимо только два варианта передаточного числа, и они определяются включением и отключением электромагнита, то при включении электромагнита можно в системе управления установить одно значение коэффициента kгп, а отключению – другое. Если известно время переходного процесса изменения рабочего объема насоса, то можно производить изменения коэффициента kгп с задержкой на величину времени этого переходного процесса.
Если в гидропередаче необходимо ограниченное количество передаточных чисел гидропередачи, но изменения осуществляются пропорциональным приводом, необходимо установить соответствующее количество концевых выключателей, которые будут сигнализировать о необходимости изменения коэффициента kгп (рис. 24).
Для гидропередачи, в которой рабочий объем насоса может принимать любое значение в пределах диапазона регулирования необходимо устанавливать датчик, который будет непрерывно его контролировать (рис. 25).
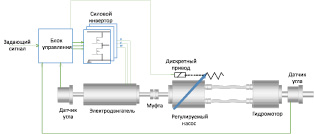
Рис. 23. Управление рабочим объемом насоса
при помощи дискретного привода
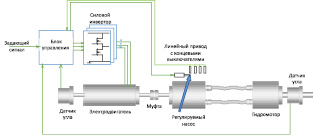
Рис. 24. Управление рабочим объемом насоса с помощью линейного привода с ограниченным количеством занимаемых позиций
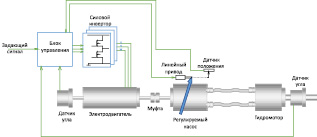
Рис. 25. Управление рабочим объемом насоса с помощью линейного привода
По всем перечисленным причинам для малогабаритной робототехники целесообразно использовать гидравлическую передачу.
При борьбе за проценты КПД необходимо снижать количество трущихся поверхностей. В случае гидравлической передачи можно поместить электродвигатель и насос в один корпус, а лишние уплотнения (например, уплотнения вала насоса и вала электродвигателя) убрать. При этом электродвигатель будет погружен в гидравлическое масло. В этом случае все системы подвода и отвода энергии (электрические и гидравлические линии) будут неподвижными, что
существенно облегчает их герметизацию. Если при этом еще организовать постоянное обтекание корпуса электродвигателя гидравлическим маслом, то, при правильном расчете и организации теплообмена, это будет эффективным методом отвода теплоты от обмоток электродвигателя, что позволит электродвигателю дольше работать в режимах, превышающих номинальный. Проблема отвода теплоты от электродвигателя и механического редуктора является серьезным недостатком механической передачи. Она особо сильно возникает в малогабаритных системах [30]. Следствием погружения электродвигателя в гидравлическое масло будет требование устойчивости датчика угла поворота вала электродвигателя к погружению в гидравлическую жидкость. В этом случае в качестве датчика угла поворота вала электродвигателя лучше всего подойдет резольвер (СКВТ). Кроме того, для снижения сил вязкого трения, возникающих в результате вращения ротора электродвигателя в гидравлическом масле, следует снижать частоту вращения ротора. Это является еще одним доводом к тому, чтобы снижать передаточное число.
Значение передаточного отношения гидропередачи можно получить из уравнения баланса расходов [23]
Qн = Qгм + Qут + Qпер, (25)
|
где Qн – |
объемная подача насоса; |
|
Qгм – |
теоретический расход гидромотора; |
|
Qут – |
суммарные утечки насоса и мотора; |
|
Qпер – |
суммарные перетечки насоса и гидромотора. |
Объемную подачу насоса можно рассчитать по следующей формуле
Qн = Vн0∙nн, (26)
|
где Vн0 – |
рабочий объем насоса; |
|
nн – |
частота вращения вала насоса. |
Теоретический расход гидромотора выражается формулой:
Qм = Vм0∙nм, (27)
|
где Vм0 – |
рабочий объем гидромотора, |
|
nм – |
частота вращения вала гидромотора. |
Теперь, если подставить выражения (26) и (27) в выражение (25) и сделать некоторые преобразования, получим

где iгп – передаточное отношение гидропередачи.
Из этого выражения видно, что утечки уменьшают передаточное число гидропередачи на некоторую величину, которая, в общем случае, зависит от давления в гидросистеме и скоростей вращения валов гидроагрегатов. Таким образом передаточное число может меняться в зависимости от режима работы гидравлической передачи. В связи с этим, нет возможности однозначно установить положение вала электродвигателя по положению вала гидромотора и наоборот. Угловое положение вала вентильно-индукторного электродвигателя необходимо знать для возможности управления им в векторном режиме управления. Такой принцип управления подобным двигателем позволяет значительно поднять его КПД и, как следствие, КПД всей передачи. В связи с этим невозможно установить датчик угла поворота только на один элемент, а угловое положение второго вычислять по значению первого. Необходимо устанавливать датчик угла поворота как на вал электродвигателя, так и на выходной вал гидро-
мотора (рис. 26).

Рис. 26. Схема установки датчиков угла на гидропередачу
В этом случае датчик угла поворота вала электродвигателя будет использоваться в системе управления двигателем, а датчик угла поворота вала гидромотора будет замыкать главную обратную связь привода.