
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания

ЭНЕРГОЭФФЕКТИВНЫЕ СИСТЕМЫ ГИДРАВЛИЧЕСКИХ ПРИВОДОВ ШАГАЮЩИХ МАШИН: МОНОГРАФИЯ
Семенов С. Е., Щербачев П. В., Тарасов О. И.,
Построение структурной схемы системы управления электродвигателем
Структурную схему системы управления электродвигателем можно составить исходя из нижеследующих соображений. Для получения величины рассогласования между требуемым значением угла поворота вала можно воспользоваться формулой
∆φ = φзад.гм – φтек.гм,
|
где φзад.гм – |
необходимый (заданный) угол поворота вала гидромотора; |
|
φтек.гм – |
текущее значение угла поворота гидромотора; |
|
∆φ – |
рассогласование между заданным углом поворота вала и текущим. |
Данное рассогласование следящая система должна компенсировать для достижения необходимого углового положения выходного вала. В случае электродвигателя с редуктором вал электродвигателя должен повернуться на угол больший угла рассогласования на коэффициент редукции передачи. В связи с тем, что коэффициент редукции в случае гидравлической передачи неизвестен (и может изменяться в процессе работы), φтек.гм постоянно должен контролироваться датчиком, находящимся на валу гидромотора. Угол рассогласования между текущим и конечным положением вала ротора электродвигателя будет вычисляться по формуле
∆α = ∆φ∙iгп,
|
где ∆α – |
угол рассогласования между текущим и конечным положением вала ротора; |
|
iгп – |
передаточное отношение гидропередачи. |
Так как величина ∆α зависит от величины ∆φ и в процессе работы привода постоянно вычисляется, то переменное передаточное отношение не внесет позиционной ошибки в конечное положение ротора гидромотора, но изменит коэффициент усиления разомкнутого контура следящей системы. В результате этого, если в системе управления заложить статичный iгп, настроенный для определенного режима работы передачи, то электрогидравлический следящий привод при низком передаточном отношении может стать неустойчивым,
а на высоких передаточных отношениях переходный процесс может стать слишком затянутым [27]. Для решения этой проблемы необходимо в системе управления следящим приводом изменять коэффициент iгп в соответствии с текущим рабочим объемом регулируемого насоса.
После вычисления необходимого угла рассогласования необходимо сформировать такое управляющее воздействие на электродвигатель, чтобы в любом режиме работы он развивал максимальное значение КПД. Для этого необходимо так направлять вектор потокосцепления статора Ψs, чтобы при имеющимся значении потребляемой мощности на данной скорости вращения момент на валу был максимальным. В связи с тем, что магнитный момент, возникающий в электродвигателе, пропорционален векторному произведению потокосцепления статора на потокосцепление ротора Ψr [25], то можно записать выражение

|
где Mэд – |
магнитный момент на валу электродвигателя; |
|
θ – |
угол между векторами потокосцепления статора и ротора; |
|
kL – |
коэффициент пропорциональности, который учитывает индуктивность обмоток статора, количество пар полюсов электродвигателя и магнитные свойства магнитопроводов. |
Из этого выражения следует, что для максимальной величины момента угол между потокосцеплениями статора и ротора должен составлять 90°. И, соответственно, для того, чтобы задать требуемое направление вектора потокосцепления статора необходимо определить направление вектора потокосцепления ротора. В связи с тем, что у индукторного двигателя с явнополюсным ротором источником магнитного поля является постоянный магнит, жестко зафиксированный на валу, то направление вектора потокосцепления совпадает с угловым положением ротора, а величина модуля вектора определяется свойствами магнита. Поэтому для определения направления потокосцепления ротора используют датчик углового положения вала электродвигателя. Направление вектора потокосцепления статора совпадает с направлением суммарного вектора тока, протекающего в обмотках статора. Поэтому если так задавать значения токов в обмотках, чтобы их суммарный вектор был расположен под углом 90° к вектору потокосцепления ротора, то мы будем получать максимальный момент на роторе электродвигателя и, соответственно, максимально возможное значение КПД электродвигателя при данной величине модуля вектора суммарного тока.
Величина токов в обмотках статора определяется приложенными к ним величинами напряжений, величинами противо-ЭДС, возникающих в каждой обмотке в результате вращения магнитного поля ротора и динамическими процессами изменения токов в каждой обмотке, которые возникают по причине того, что обмотки статора обладают индуктивностью. Чтобы снизить влияние противо-ЭДС и динамических процессов на вектор тока в систему управления электродвигателем вводят глубокую обратную связь по значениям величин токов в каждой обмотке, которые получают с помощью датчиков тока, установленных в каждой фазе электродвигателя. В качестве датчиков тока могут быть использованы резисторы низкого номинала. Таким образом определяя перепад напряжения на этих резисторах можно по закону Ома вычислить ток в каждой фазе. К сожалению, данное решение, хоть и является наиболее простым, не подходит для данной системы т.к. на токоизмерительных резисторах будет рассеиваться мощность, что снизит КПД системы. В качестве более подходящего решения будет выбор датчиков тока на основе эффекта Холла. Эти датчики обладают низким сопротивлением (сравнимым с сопротивлением проводника) и высокими динамическими характеристиками. Линейку подобных датчиков тока на различные диапазоны измеряемой величины вместе со встроенным усилителем выпускает фирма Allegro Microsystems [29].
Из вышеизложенного следует, что для получения максимального КПД в электрогидравлической передаче, следящей по углу поворота вала гидромотора, система управления должна задавать такие значения напряжений на обмотках электродвигателя, чтобы направление вектора суммарного тока фазы всегда отличалось от направления потокосцепления ротора на 90° в сторону необходимого поворота, а модуль вектора тока изменялся пропорционально величине рассогласования текущего и желаемого положения ротора электродвигателя. Для графической иллюстрации данного принципа (рис. 27) следует ввести две ортогональные системы координат: одна система координат
с осями α и β будет неподвижной, при том ось α будет совпадать с осью одной из обмоток статора, а вторая система координат с осями d и q будет вращающейся, где направление оси d будет совпадать с вектором потокосцепления ротора.
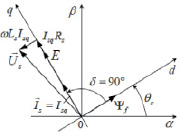
Рис. 27. Графическое изображение векторов суммарного тока и напряжения
Пусть вектор потокосцепления ротора Ψf расположен под углом θс к оси α. Тогда суммарный вектор тока в статоре будет расположен вдоль оси q. Вектор суммарного значения напряжений, поданного на обмотки статора Us, за счет глубоких обратных связей по токам в обмотках должен быть повернут на дополнительный угол, который компенсирует реактивное сопротивление обмотки двигателя ωLsIsq, где ω – скорость вращения вала электродвигателя; Ls – индуктивность обмотки статора; Isq – проекция вектора тока, протекающего через статор на ось q. При этом для того, чтобы вычислить требуемые значения напряжений на каждой обмотке статора электродвигателя необходимо разложить полученный вектор напряжения Us на составляющие по осям обмоток статора. Получатся три проекции: UsU, UsV, UsW, величины которых и определяют уровни напряжений на каждой катушке. В соответствии с вычисленными значениями фазных напряжений система управления должна выработать необходимый управляющий сигнал на силовой инвертор, подключенный к электродвигателю.
Структурную схему управления приводом можно представить в виде схемы, показанной на рис. 28.
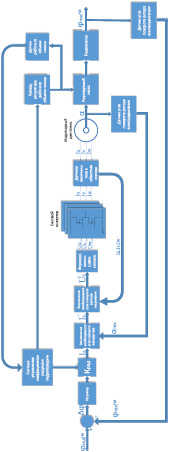
Рис. 28. Структурная схема следящей системы на основе гидропередачи
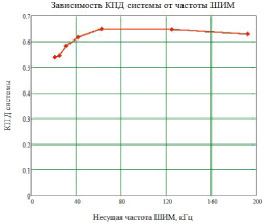
Рис. 29. Зависимость КПД электродвигателя с системой управления в зависимости от несущей частоты ШИМ
Для формирования необходимого уровня напряжений на обмотках статора наиболее хорошо зарекомендовала себя широтно-импульсная модуляция управляющего сигнала. Но в зависимости от параметров электродвигателя, несущая частота ШИМ оказывает существенное влияние на КПД системы управления электродвигателем. Так при низких значениях частот ШИМ сигнала КПД электродвигателя снижается за счет того, что ротор успевает повернуться на значительный угол, и разница углов между векторами потокосцепления ротора и статора становится меньше 90 градусов, а также возникают значительные пульсации тока в обмотках статора. При высоких значениях частот увеличивается потребление энергии на управление силовыми ключами. В связи с тем, что оптимальное значение КПД будет зависеть от большого числа параметров (индуктивности и сопротивления обмоток электродвигателя, выбранной марки силовых ключей, метода управления включением и выключением силовых ключей, необходимым временем задержки между переключениями силовых ключей и т.д.), для подбора оптимального значения частоты лучшим способом будет проведение эксперимента на номинальном режиме работы, если это возможно. На рис. 29 представлена зависимость КПД электродвигателя с системой управления в зависимости от несущей частоты ШИМ для электродвигателя фирмы MAXON.