
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
4.1.Математические зависимости для расчета параметров жидкостного АБУ, установленного на гибком шпинделе с жесткими опорами
Как показали экспериментальные исследования, при балансировке вблизи критической скорости полное уравновешивание шпинделя не происходило. Остаточный дисбаланс при увеличении скорости вращения от первой критической сначала уменьшался, а затем возрастал. Теоретические зависимости, приведенные в п. 2.3.1,противоречат этим экспериментальным данным. Из классической теории колебаний следует, что с учетом сил диссипации будет иметь место угол запаздывания ε (сдвиг фаз) между плоскостью отклонения шпинделя и плоскостью дисбаланса. Поэтому для расчетов гибких шпинделей с жидкостным АБУ на абсолютно жестких опорах были предложены переработанные математические зависимости, более полно описывающие закономерности процесса балансировки шпинделей с жидкостным АБУ.
Основным отличием разработанной модели от моделей, предложенных Гусаровым А.А. и Нестеренко В.П., являлся учет в системе дополнительных сил, действующих на шпиндель: сил трения, возникающих в результате контакта шпинделя с диском о воздух (внешнее трение), и сил трения жидкого вещества внутри балансировочной камеры (внутреннее трение). Шпиндель считался невесомым с упругостью c в радиальном направлении. Полагалось, что масса всей системы сосредоточена в центре масс диска (шлифовальном круге), масса легкоплавкого вещества внутри балансировочной камеры намного меньше массы всей системы, а диск закреплен посередине вала. Гироскопический момент не учитывался. Шпиндель вращался на закритической скорости при постоянной частоте вращения. Сила тяжести не учитывалась вследствие ее малости по отношению к центробежным силам при вращении шпинделя на реальных скоростях.
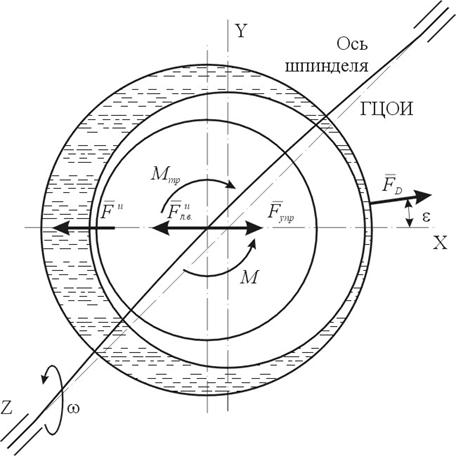
Рис 4.1. Поперечное сечение АБУ, установленного на гибком шпинделе с жесткими опорами
На рис. 4.1. показаны поперечное сечение балансировочной камеры при вращении шпинделя с закритической частотой вращения, расположение легкоплавкого вещества и действующие на него силы и моменты:
- сила инерции вращающегося шпинделя с шлифовальным кругом и балансировочной камерой ![]() ;
;
- равнодействующая сил инерции легкоплавкого вещества внутри балансировочной камеры ![]() (силы
(силы ![]() и
и ![]() действуют в направлении противоположном прогибу шпинделя);
действуют в направлении противоположном прогибу шпинделя);
- сила упругости ![]() , стремящаяся уменьшить деформацию оси шпинделя по отношению к оси вращения, проходящей через центры подшипниковых опор;
, стремящаяся уменьшить деформацию оси шпинделя по отношению к оси вращения, проходящей через центры подшипниковых опор;
- момент трения ![]() , зависящий от коэффициента сопротивления колебаниям n и скорости вращения (его направление противоположно направлению угловой скорости вращения шпинделя);
, зависящий от коэффициента сопротивления колебаниям n и скорости вращения (его направление противоположно направлению угловой скорости вращения шпинделя);
- вращающий момент ![]() привода, совпадающий по направлению с угловой скоростью ω;
привода, совпадающий по направлению с угловой скоростью ω;
- сила инерции неуравновешенной массы ![]() (источник дисбаланса), действующая под углом e по отношению к прогибу шпинделя.
(источник дисбаланса), действующая под углом e по отношению к прогибу шпинделя.
Тогда согласно принципу Даламбера можно записать:
| | (4.1) |
При проекции уравнения 4.1 на ось Х получим:
| | (4.2) |
Как известно, сила инерции неуравновешенной массы зависит от начального дисбаланса шлифовального круга D (балансировочная камера и сам шпиндель полностью уравновешенны), а также от частоты вращения w следующим образом:
| | (4.3) |
где: m – неуравновешенная масса на шлифовальном круге;
q – радиус вращения неуравновешенной массы.
Тогда зависимость для угла запаздывания можно записать в виде:
| | (4.4) |
где n – коэффициент сопротивления колебаниям;
wкр – критическая частота вращения;
w - текущая частота вращения.
Для определения коэффициента сопротивления колебаниям можно воспользоваться известной методикой [141], а критическую частоту вращения вычислить по зависимостям п. 2.1.
Изменение угла запаздывания ε в диапазоне от нуля до p определялось по зависимости:
| | (4.5) |
Ее график, представленный на рис. 4.2., показывает зависимость угла запаздывания от различных коэффициентов сопротивления колебаниям (n1 = 1 1/с; n2 = 30 1/с; n3 = 100 1/с, при ωкр = 1000 1/с) и скоростей вращения шпинделя.
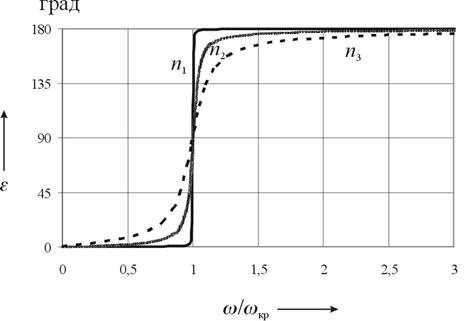
Рис. 4.2. Зависимость угла запаздывания ε от коэффициента сопротивления колебаниям n и относительной частоты вращения ω/ωкр
Силы инерции легкоплавкого вещества и вращающихся частей шпинделя, а также сила упругости определялись из следующих уравнений:
| | (4.6) |
где: M – масса вращающихся частей шпинделя (шлифовального круга и балансировочной камеры);
х – отклонение ГЦОИ шпинделя от оси вращения в месте крепления балансировочной камеры;
l – длина балансировочной камеры;
R – внешний радиус балансировочной камеры.
После подстановки уравнений (4.6) и (4.3) в (4.2) получим:
| | (4.7) |
Откуда следует:
| | (4.8) |
Дисбаланс, который создает легкоплавкое вещество, определялся из зависимости:
| | (4.9) |
Остаточный дисбаланс шпинделя после балансировки ![]() определялся по теореме косинусов:
определялся по теореме косинусов:
| | (4.10) |
Из зависимости (4.10) следует, что в системе после балансировки всегда будет присутствовать остаточный дисбаланс, так как сумма вектора полезного дисбаланса и дисбаланса, создаваемого неуравновешенной массой, не будет равной нулю.