
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
4.2.Математические зависимости для АБУ, установленного на жестком шпинделе с жесткой и упругой опорами
Выше рассмотрено поведение АБУ, установленного на жестком шпинделе, вращающимся на одной жесткой и одной упругой опорах. Данная схема является типовой при балансировке шпинделей металлообрабатывающих станков пассивными АБУ (рис. 4.3).
Для вывода уравнений поставленной задачи примем массу шпинделя равной mрот, а коэффициент жесткости упругой опоры с будем считать одинаковым в направлениях, перпендикулярных оси шпинделя, при массе упругой опоры mоп и расстоянии между опорами - lоп. Данная расчетная схема была выбрана потому, что она позволяет снизить передачу вибрации несбалансированного шлифовального круга на корпус и переходить критическую скорость с минимальными изгибающими напряжениями на шпинделе. Считалось, что дисбаланс в ротативной системе создает только шлифовальный круг, а характер дисбаланса статический, что позволяет его свести в одну результирующую центробежную силу, приложенную в центре шлифовального круга перпендикулярно оси вращения. Было принято, что все вращающиеся элементы, кроме круга, сбалансированы и не способны добавлять дисбаланс в систему. Центр тяжести шлифовального круга находится на расстоянии lшк от центра неподвижной опоры. Балансировочная камера длиной l и внутренним радиусом R частична заполнена легкоплавким веществом плотностью r, способным неоднократно менять свое агрегатное состояние. Учитывалось, что на шпиндель действовали силы внутреннего и внешнего сопротивления, зависящие от коэффициента сопротивления колебаниям n [30].
При вращении неуравновешенного шпинделя на закритической скорости w его геометрическая ось в результате прецессионного движения отклоняется от оси вращения на угол q. При выводе зависимостей полагалось, что шпиндель был абсолютно жестким, так как его собственная критическая частота на жестких опорах была гораздо выше частоты вращения. По законам динамики он вращался «тяжелой» стороной во внутрь прогиба и угловая скорость прецессионного движения была равна w. В результате вращения на него действовали следующие силы и моменты:
- центробежные силы вращающихся частей (шпинделя ![]() , пустой балансировочной камеры
, пустой балансировочной камеры ![]() , упругой опоры
, упругой опоры ![]() , шкива
, шкива ![]() и шлифовального круга
и шлифовального круга ![]() );
);
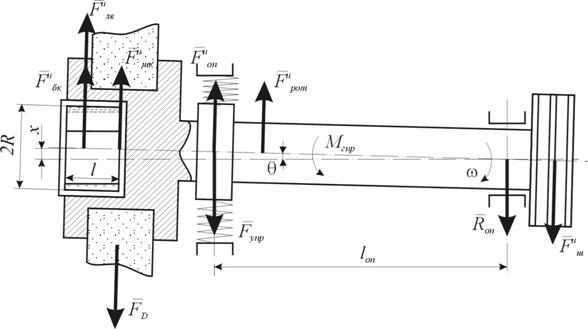
Рис 4.3. Схема шпинделя с жидкостным АБУ
- центробежная сила от вращения несбалансированной массы на шлифовальном круге, т.е. сила от дисбаланса ![]() ;
;
- центробежная сила легкоплавкого вещества ![]() (см. п. 2.3.1.);
(см. п. 2.3.1.);
- сила упругости ![]() , действующая со стороны упругой опоры и стремящаяся совместить ось шпинделя с осью вращения;
, действующая со стороны упругой опоры и стремящаяся совместить ось шпинделя с осью вращения;
- гироскопический момент ![]() , стремящийся, как и сила упругости, совместить ось шпинделя с осью вращения;
, стремящийся, как и сила упругости, совместить ось шпинделя с осью вращения;
- сила реакции жесткой опоры Rоп.
Тогда уравнение равновесия будет иметь вид:
| | (4.11) |
где: ![]() - расстояние от центра жесткой опоры до точки приложения
- расстояние от центра жесткой опоры до точки приложения ![]() ;
;
![]() - расстояние от точки приложения силы инерции шпинделя до центра жесткой опоры.
- расстояние от точки приложения силы инерции шпинделя до центра жесткой опоры.
Для шпинделя сложной формы при расчете его силы инерции использовалось выражение [18]:
| | (4.12) |
Гироскопический момент определялся следующим образом [18]:
| | (4.13) |
где: I – момент инерции шпинделя со шлифовальным кругом и балансировочной камерой относительно оси вращения;
wпрец – угловая скорость прецессии оси шпинделя.
Как отмечалась выше, все расчеты для металлообрабатывающих станков следует проводить для случая прямой синхронной прецессии, когда справедливо равенство wпрец = w. Принимая во внимание вышеизложенное, для малых углов q гироскопический момент будет определяться формулой:
| | (4.14) |
Учитывая, что:
| | (4.15) |

где: ![]() - смещение точки приложения
- смещение точки приложения ![]() от оси вращения;
от оси вращения;
r – радиус расположения центра тяжести неуравновешенного груза;
mшк – масса шлифовального круга (или иного источника дисбаланса);
![]() - масса шкива или турбины, если движение передается на шпиндель через нее;
- масса шкива или турбины, если движение передается на шпиндель через нее;
m – масса неуравновешенного груза (источника дисбаланса шлифовального круга).
После подстановки в (4.11) выражения (4.14) и (4.15) получим:
| | (4.16) |

Выражая все переменные хi (отклонение точек приложения соответствующих результирующих центробежных сил от оси вращения шпинделя) через одну – хбк, с учетом жесткости шпинделя получим:
| | (4.17) |
Малые углы отклонения оси шпинделя в зависимости от х определяются так:
| | (4.18) |
Подставляя зависимости (4.17) и (4.18) в (4.16), получим общее уравнение вращения шпинделя с АБУ в виде:
| | (4.19) |
Таким образом получено выражение для нахождения отклонения оси вращения шпинделя от оси вращения балансировочной камеры в точке приложения центробежной силы:
| | (4.20) |

Полезный дисбаланс, возникающий в процессе балансировки за счет перераспределения КМ, можно определить по формуле:
| | (4.21) |
При установке на шпинделе многокамерного жидкостного АБУ уравнение (4.20) преобразуется к виду:
| | (4.22) |

где: Ri – радиус балансировочной полости i – й камеры.
Зависимость (4.22) справедлива при условии, когда длина всех камер одинакова и в них содержится одно и тоже легкоплавкое вещество, т.е. с одинаковой плотностью и температурой плавления.
Для многокамерного АБУ формула (4.21) примет вид:
| |
Из вышеприведенных зависимостей (4.20) и (4.22) следует, что отклонение оси шпинделя от его оси вращения будет зависеть от начального дисбаланса и скорости вращения при неизменных остальных конструктивных параметрах шпиндельной системы. Вектор полезного дисбаланса будет расположен под углом меньшим π относительно вектора начального дисбаланса и, вследствие этого, идеальной или полной балансировки достичь невозможно. Поэтому после балансировки в системе будет всегда присутствовать остаточный статический дисбаланс![]() , а если
, а если ![]() , то и моментный остаточный (послебалансировочный) дисбаланс
, то и моментный остаточный (послебалансировочный) дисбаланс ![]() (см. рис. 4.4.). Для срединной плоскости шлифовального круга эти дисбалансы можно определить из известных соотношений:
(см. рис. 4.4.). Для срединной плоскости шлифовального круга эти дисбалансы можно определить из известных соотношений:
| | (4.23) |
Таким образом на стадии разработки конструкции шпинделя необходимо заранее предусматривать возможность совмещения плоскости действия центробежных сил легкоплавкого вещества и шлифовального круга (равенство ![]() и
и ![]() ) и обеспечение равенства моментного остаточного дисбаланса нулю.
) и обеспечение равенства моментного остаточного дисбаланса нулю.
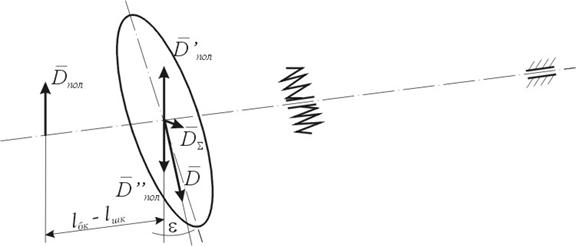
Рис. 4.4. Схема для вычисления дисбалансов шпинделя после его балансировки
Для определения удельного дисбаланса eст находится суммарная масса системы, которая совершает колебания под действием неуравновешенных сил:
| | (4.24) |
Тогда удельный дисбаланс можно определить по следующей зависимости:
| | (4.25) |

После чего можно определить класс точности балансировки АБУ [129]. При несоответствии требованиям ГОСТ необходимо изменить начальные конструктивные параметры шпинделя и АБУ (массу отдельных частей шпинделя; длину, радиус и количество балансировочных камер; плотность легкоплавкого вещества; длину шпинделя и места крепления камеры, круга, шкива, и т.д.).
При использовании полученных уравнений необходимо иметь ввиду, что они дают результаты с определенной точностью только в области закритических частотах вращения. На докритических частотах следует изменить уравнение (4.11), взяв с обратным знаком силу действия несбалансированной массы ![]() .
.
Приведенные выше уравнения не учитывают поведение АБУ на околокритических оборотах (при значениях ![]() близких к 90°). В случае вращения шпинделя на этих оборотах балансировка АБУ теряет физический смысл, так как полезный дисбаланс, создаваемый легкоплавким веществом внутри камеры, не будет погашать дисбаланс шлифовального круга, а наоборот, будет его увеличивать. В случае расчета шпинделя с жидкостным АБУ на околокритических оборотах силу
близких к 90°). В случае вращения шпинделя на этих оборотах балансировка АБУ теряет физический смысл, так как полезный дисбаланс, создаваемый легкоплавким веществом внутри камеры, не будет погашать дисбаланс шлифовального круга, а наоборот, будет его увеличивать. В случае расчета шпинделя с жидкостным АБУ на околокритических оборотах силу ![]() , определяемую ранее по зависимости (4.15), следует рассчитывать по следующей формуле:
, определяемую ранее по зависимости (4.15), следует рассчитывать по следующей формуле:
| | (4.26) |
где: m - коэффициент динамичности, характеризующий увеличение амплитуды колебаний х [14, 140].