
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
Баубеков С. Д., Таукебаева К. С.,
4.3.3. Проектирование ФТОУ-2.3 [34]
Описание конструкции модернизированной машины 1022 кл.
Автоматизация технологического процесса сборки изделий ЛП при современной тенденции перехода на мелкосерийное производство с частой сменой моделей, видов изделия, необходимой для удовлетворения спроса населения и конкурентоспособности их, имеет первостанное значение.
Автоматизированная машина 1022 предназначена для автоматического ориентирования и перемещения швейных деталей относительно иглы швейной машины. Функция оператора при работе на таких машинах сводится лишь к установке деталей под рабочие органы и пуск машины, процессе ориентирования и перемещения швейных деталей происходит без участия и контроля оператора.
Перспективность создания таких устройств обусловлена конструктивной простотой, дешевизной в изготовлении, удобством в обслуживании, использованием стандартных швейных головок. Модернизированные швейные машины обладают существенной технологической гибкостью.
Отличительными признаками этих машин являются:
– механизм транспортирования имеет дополнительную рейку гибко связанную с валом горизонтального отклонения рейки;
– ограничительный упор установлен в определенном месте;
– механизм дополнительной рейки имеет средство регулировки её положения;
– гибкий механизм имеет средство регулировки его натяжения;
– реконструкция механизма выполняется без ущерба его конструкции;
– при необходимости можно демонтировать дополнительный реечный механизм и машина вновь становится прежней машиной общего назначения.
– при изменении размеров кривизны контуров нет необходимости дополнительной настройки, регулировки, замены деталей, т.е. механизм обладает достаточной технологической гибкостью. Процесс выполнения ориентации детали аналогична с машиной 224 кл. (см. рис. 3.23, главу 3, раздел 3.7.1 Б).
На рис. 4.15 приведена кинематическая схема модернизированного механизма транспортирования и ориентации деталей.
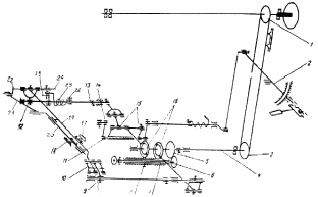
Рис. 4.15. Кинематическая схема механизма ориентирования – ФТОУ-2.3
Механизм состоит из ведущего вала, зубчатой ременной передачи 1,3. регулятора шага стежка 2, ведущего вала 4, зубчатой пары 5, челночного вала 6, втулки 7, винтов крепления 8, 9, системы коромысел 10, рычага 11, втулки-ограничителя 13, осы 14, рычагов 15, эксцентриков 16, основной рейки 17, дополнительной рейки 18, основной рамы 19, дополнительной рамы 20, шатуна 21, рычага 22,ограничительной планки 23, установленной винтом на валу горизонтального отклонения реек, штыря 24, установленного винтом на конце рычага 22, пружины 25, с одной стороны соединенной со штырем 24, с другой стороны с валом горизонтального отклонения 12 винтом 26. Горизонтально отклоняющий вал через систему рычагов соединен с эксцентриком 16, валом 4.
Механизм работает следующим образом. От главного вала через зубчатую ременную передачу и шкивы 1, 3 ведущий вал 4 получает вращательное движение. Эксцентрик 16, установленный на валу 4 через систему рычагов передает качательное перемещение на вал 12. Рейка получает горизонтальное перемещение, а дополнительная рейка 18 в это время получает также горизонтальное движение, но через пружину 25, штыря 24, рычага 22, шатуна 21, дополнительной рамы 20. Это движение по направлению выполнения строчки (вдоль стежка) может отличаться по величине и скорости (см. рис. 4.15). Дополнительная рейка 18 опережает основную 17, если контур детали имеет вогнутый контур т.е. знак кривизны «–ρ» и отстает, если знак кривизны «+ρ». Дополнительная рейка 18 имеет средство регулировки давления края детали на ограничительный упор. Это достигается регулировкой сжатия пружины 25 винтом 26. Дополнительная рейка 18 приводится в исходное положение с помощью планки 26 при обратном ходе рейки 17 посредством вала 12.
Рейки 17 и 18 движение в вертикальном направлении получают от вала 4, эксцентрика 16, шатуна, коромысла и вала горизонтального отклонения, на котором с помощью винта 9 соединены коромысла 10, рама 19. К раме 19, посредством двух закрепленных на ней втулок-направляющих присоединена дополнительная рейка 18, т.е. она получает в вертикальном направление одинаковую с основной рейке 17 по величине и направлению скорость движения.
Таким образом, в результате модернизации базовой машины 1022 кл., процесс ориентации и перемещения деталей относительно рабочих органов швейной машины может выполняться без участия оператора, т.е. автоматически.
Данный способ сборки деталей взят за основу при создании выше отмеченной машины, а также машин 597, 211, 1224, 550, 1232 кл., промышленное использование которых показало, что кроме роста производительности, улучшения условий труда, улучшения условий работы, обеспечивается экономия материалов за счет уменьшения припусков при вырубке и раскрое заготовок изделия. Также обеспечивается уменьшение припуска на накладку, точное прокладывание строчек по краю деталей, причем последнее не зависит от квалификации оператора.
Машина внедрена в ряде фабрик стран СНГ. Специалисты этих предприятий отмечают безотказность работы машины и технологическую гибкость, простоту и дешевизну реконструкции базовых машин и её наладки для автоматизации операций при переходе на новую модель, фасон, вид, размер изделий.