
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
ДАТЧИКИ СИСТЕМ АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ БУРЕНИЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН
Васильев С. И., Лапушова Л. А.,
УСИЛИТЕЛИ АВТОМАТИКИ
В современных системах автоматики для управления исполнительными механизмами требуется мощность, во много раз превышающая выходную мощность сигнала датчиков. Поэтому на практике возникает необходимость в усилении сигналов датчиков. Для этой цели служат усилители различных типов.
В зависимости от вида вспомогательного источника энергии усилители можно разбить на следующие группы: электрические, гидравлические и пневматические. Электрические усилители в свою очередь делятся на ионные, электронные, электромеханические, электромашинные и магнитные.
Из перечисленных выше электрических усилителей рассмотрим магнитные усилители, так как другие типы усилителей должны изучаться в соответствующих курсах.
Магнитным называется усилитель, принцип действия которого основан на изменении магнитной проницаемости ферромагнитного сердечника катушки при изменении подмагничивающего (управляющего) тока.
В простейшем виде магнитный усилитель представляет собой дроссель насыщения переменного тока, в цепь которого последовательно с рабочей обмоткой (Wp) включено сопротивление нагрузки (Rн) (рис. 5). Дроссель переменного тока это устройство, индуктивность которого может меняться в широких пределах за счет подмагничивания дросселя постоянным током.
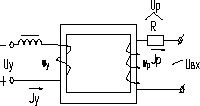
Рис. 5. Схема дроссельного магнитного усилителя
Выходное напряжение (Up) магнитного усилителя снимается с нагрузки (Rн).
Будем считать, что ток в рабочей цепи (Jp) является синусоидальным и его значение модно найти по формуле


где Uвх – напряжение питания магнитного усилителя; Z – полное активное сопротивление рабочей цепи; X – индуктивное сопротивление рабочей обмотки; R – катушки переменному току.
Полное активное сопротивление рабочей цепи (Z) состоит из активного сопротивления нагрузки (Rp) и активного сопротивления рабочей обмотки (Rw)
R = Rн + Rw,
где R – активное сопротивление; Хн – индуктивное сопротивление.
Индуктивное сопротивление рабочей обмотки (Хн) определяется по формуле

где ωр – угловая частота переменного напряжения рабочей цепи ωр = 2πf; Lp – индуктивность рабочей обмотки, определяемая по формуле
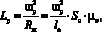
где  – модуль магнитного сопротивления сердечника
– модуль магнитного сопротивления сердечника

здесь ωp – число витков рабочей обмотки; Sc – площадь поперечного сечения ферромагнитного сердечника; lc – длина средней магнитной линии сердечника. µc – магнитная проницаемость сердечника. С учетом последних выражений ток в рабочей цепи запишется в виде:
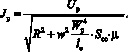
Из этой формулы видно, что ток в рабочей цепи, или в нагрузке зависит от индуктивности рабочей обмотки (Lp), которая пропорциональна магнитной проницаемости (µc). В свою очередь магнитная проницаемость ферромагнитного сердечника (µc) зависит от магнитной индукции (В) и напряженности внешнего магнитного поля (Н):

При отсутствии управляющего напряжения (Jу) на входе дроссельного магнитного усилителя напряженность магнитного поля Н = О. В этом случае магнитная проницаемость (µc) имеет большое значение. Следовательно, индуктивность (Lр) и индуктивное сопротивление рабочей обмотки (XL) имеет также большое значение. В данном случае ток в рабочей цепи (Jp) имеет небольшое значение. Его обычно называют током холостого хода. При этом большая часть переменного напряжения (Up) падает на рабочей обмотке (Wр), а незначительная часть – на нагрузке (Rн).
При подаче на вход усилителя управляющего напряжения (Jу) по цепи управления потечет ток управления (Jу), в результате чего возникнет напряженность постоянного магнитного поля Н. Ферромагнитный сердечник усилителя насыщается и его магнитная проницаемость (µc) падает. Следовательно, индуктивное сопротивление рабочей обмотки (Хр) также падает, в результате чего ток в рабочей цепи (Jp) увеличивается. В этом случае большая часть переменного напряжения (U) падает уже на нагрузке (Rн), а меньшая часть – на рабочей обмотке (Wp).
Следует заметить, что с помощью тока управления (Jy) можно регулировать ток в рабочей цепи, т.е. ток в нагрузке (Jp).
Если обмотку управления (Wy) выполнить с числом витков во много раз превышающим число витков рабочей обмотки (Wр), то получим эффект усиления по току.
К основным достоинствам магнитных усилителей можно отнести:
■ высокую надежность и большой срок службы;
■ возможность питания непосредственно от сети переменного тока промышленной частоты;
■ неограниченная выходная мощность;
■ высокий КПД;
■ возможность создания бесконтактных систем автоматического управления.