
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
ДАТЧИКИ СИСТЕМ АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ БУРЕНИЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН
Васильев С. И., Лапушова Л. А.,
Тензометрические датчики измерения усилия под опорой
Устанавливаются на опору редуктора привода роторного стола и воспринимает усилие реакции опоры (сжатие) (рис. 10, 11).
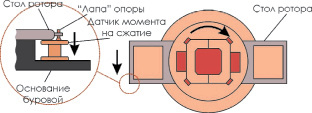
Рис. 10. Схема крепления и принцип действия датчика измерения момента под «лапой» стола ротора



а б в
Рис. 11. Датчики момента на роторе для измерения усилия под «лапой» опоры: а – ДМР-312-02 (ЗАО «ГЭЛС»); б – ДМР-Т; в – ДМР-Д (оба ООО НПФ «Геосфера»)
Принцип действия основан на том, что усилие, действующее на опорную пяту датчика, пропорционально моменту сопротивления вращению ротора. Это усилие вызывает упругую деформацию мембраны, на которой закреплены узлы дифференциального трансформатора. При изгибе мембраны, возникающее рассогласование в обмотках трансформатора формирует электрический сигнал, пропорциональный величине деформации. При накоплении массива измеренных значений не менее 10 раз в секунду, микроконтроллер платы преобразования вычисляет усредненное значение сигнала и приводит его к стандартному диапазону величин, основные характеристики даны в табл. 5.
Таблица 5
Технические характеристики датчиков момента на роторе для измерения усилия под «лапой» опоры
|
Параметры |
ДМР-Т |
ДМР-Д |
ICS SM-005 |
ДМР-312-02 |
|
Производитель |
ООО НПФ «Геосфера» |
ООО «Геотек-Прибор» |
ЗАО «ГЭЛС» |
|
|
Диапазон измерений силы, кН |
0–60 |
0–60 |
0–100 |
0,6–30 |
|
Основная приведенная погрешность измерений δ, % |
±2,0 |
– |
±3,0 |
±2,0 |
|
Дополнительная погрешность измерений, обусловленная отклонением температур на каждые 10 °С, δt, % |
– |
– |
– |
±0,5 |
|
Диапазон рабочих температур окружающей среды, °С |
–40…+50 |
– |
–50…+50 |
|
|
Габаритные размеры, мм |
132×125×190 |
120×120×190 |
– |
192×190×310 |
|
Масса, кг, не более |
8 |
7 |
– |
5 |