
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
ДАТЧИКИ СИСТЕМ АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ БУРЕНИЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН
Васильев С. И., Лапушова Л. А.,
Датчики измерения реактивного момента между основанием и столом ротора(тензометрические на растяжение)
Принцип действия – с помощью тензопреобразователя измеряется реактивный момент роторного стола относительно станины. Датчик работает на растяжение.
Крепление – датчик устанавливается как стягивающее звено между основанием и роторным столом (рис. 12, 13).
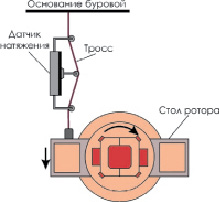
Рис. 12. Схема крепления и принцип действия датчика измерения реактивного момента


а б


в г
Рис. 13. Датчики измерения реактивного момента (растяжения), устанавливаемые в разрыв: ДМР-315-05.1 (ЗАО «ГЭЛС») (а), ДКМР-2 (СКБ «Ореол») (б) и накладываемые на неподвижную ветвь троса: ДКМ (ОАО НПФ «Геофизика») (в), ICS SK (ООО «Геотек-Прибор») (г)
В табл. 6 приведены параметры датчиков измерения реактивного момента, примеры установки электромагнитного и тензометрического датчиков показаны на рис. 14.
Таблица 6
Технические характеристики датчиков измерения реактивного момента
|
Параметры |
ДМР-315-05.1 |
ДКМР-2 |
ICS SK-01(02) |
ДМР-315-05.1 |
|
Производитель |
ЗАО «ГЭЛС» |
СКБ «Ореол» |
ООО «Геотек-Прибор» |
ЗАО «ГЭЛС» |
|
Диапазон измерений силы, кНм |
0,5–50 |
0–60 |
0–50 (0–100) |
0–10 0–30 |
|
Основная приведенная погрешность измерений δ, % |
±1,0 |
±1,0 |
±3,0 |
±(0,3+0,015Х) |
|
Дополнительная погрешность измерений, обусловленная отклонением температур на каждые 10 °С, δt, % |
±0,5 |
– |
– |
– |
|
Диапазон рабочих температур окружающей среды, °С |
–50…+50 |
– |
– |
– |
|
Габаритные размеры, мм |
650×115×180 |
– |
– |
280×160×80 |
|
Масса, кг, не более |
15 |
– |
– |
3,5 |


а б
Рис. 14. Пример датчиков момента на роторе: а – электромагнитный, установленный на силовом кабеле фазы электропривода; б – тензометрический на сжатие, установленный под «лапой» опоры редуктора привода ротора буровой установки
Типовые кривые изменения момента привода бурового инструмента при бурении скважины и в момент возникновения аварии приведены
на рис. 15.
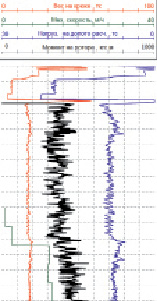

а б
Рис. 15. Типовые кривые данных момента на роторе при: а – бурении; б – бурении с последующим возникновением аварийной ситуации (слом квадрата)
Датчик ДКМ
Ниже приведено более подробное описание некоторых датчиков.
Крутящий момент роторного стола, приводящего во вращение колонну труб с инструментом, определяют по изменению натяжения цепной передачи датчиком, который устанавливается под ведущей ветвью цепи привода (рис. 16).
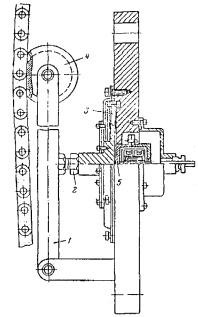
Рис. 16. Схема датчика ДКМ
При помощи регулировочного болта 2 и тарельчатой пружины 3 создаётся начальная стрела прогиба цепи привода роторного стола в месте соприкосновения звёздочки 4, установленной на рычаге 1, с цепью. При изменении момента натяжение цепи меняется, что приводит к перемещению траверсы 5. Перемещение последней влечёт за собой деформацию тарельчатой пружины и смещение рычага 1, связанного с измерительной обмоткой преобразователя и вторичным прибором.
Датчик ДКМ устанавливается под ведущей ветвью цепи привода как изображено на рис. 17, общий вид датчика приведен на рис. 18, его основные характеристики указаны в табл. 7.
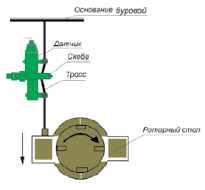

Рис. 17. Схема установки датчика ДКМ Рис. 18. Общий вид датчика ДКМ
Таблица 7
Технические характеристики датчика ДКМ
|
Параметры |
Значение |
|
Диапазон измерения, кН·м |
0–10 (по заказу) 0–30 |
|
Уровень выходного сигнала, В |
от 0 до 5 |
|
Напряжение питания, В |
12 |
|
Вес, кг |
3,5 |
|
Габариты, мм |
280×160×80 |
Датчик ДМР-Т
Датчик предназначен для контроля крутящего момента роторного стола на буровых установках с угловым редуктором путем измерения силы реакции опоры редуктора. Датчик момента на роторе ДМР-Т используется в системе СКМ «Ротор», в системе «Контур-2» и в составе различных станций геолого-технологических исследований (ГТИ) скважин.
Принцип действия основан на том, что усилие, действующее на опорную пяту датчика, пропорционально моменту сопротивления вращению ротора. Это усилие вызывает деформацию упругого элемента тензометрического преобразователя силы и разбаланс его электрического моста. Нормирующий усилитель приводит величину этого разбаланса к стандартному диапазону величин.
Датчик ДМР-Т состоит из тензометрического преобразователя силы и нормирующего усилителя. Для передачи усилия на тензометрический преобразователь в верхней части датчика установлен подпружиненный шток с опорной пятой. Нормирующий усилитель собран в отдельном корпусе и подключен к тензометрическому преобразователю электрическим кабелем через разъёмное соединение. Для установки на плоской поверхности датчик имеет монтажный фланец. Все составные части датчика выполнены из стали с антикоррозионным покрытием.

Рис. 19. Общий вид датчика ДМР-Т
Датчик устанавливается на опору редуктора привода ротора и воспринимает усилие реакции опоры (сжатие) (рис. 19), его характеристики приведены в табл. 8.
Таблица 8
Технические характеристики датчика момента на роторе ДМР-Т
|
Параметры |
Значение |
|
Диапазон измеряемых усилий, кН |
0–60 |
|
Диапазон изменения выходного сигнала, В |
0–10 (возможно 0–5) |
|
Основная приведенная погрешность измерения усилия, % |
±2 |
|
Диапазон рабочих температур, °С |
–40... + 50 |
|
Напряжение питания, В |
+12...+15 |
|
Габаритные размеры датчика, мм |
132×125×190 |
|
Масса, кг |
8 |
Датчик ДМЦ-Т
Датчик предназначен для контроля крутящего момента роторного стола на буровых установках с цепным приводом. Датчик момента на роторе ДМЦ-Т используется в системе СКМ «Ротор», в системе «Контур-2» и в составе различных станций ГТИ (геолого-технологических исследований) скважин (рис. 20).

Рис. 20. Общий вид датчика ДМЦ-Т
Датчик состоит из преобразователя ДМР-Т и оснастки с монтажным основанием и рабочим колесом. Принцип действия основан на том, что усилие, возникающее при натяжении цепи привода – пропорционально моменту сопротивления вращению ротора. Это усилие передается через рабочее колесо и вызывает деформацию упругого элемента преобразователя ДМР-Т и разбаланс его электрического моста. Нормирующий усилитель приводит величину этого разбаланса к стандартному диапазону величин.
Датчик устанавливается под ведущей ветвью цепи привода ротора и воспринимает через рабочее колесо усилие, возникающее при натяжении цепи, характеристики датчика указаны в табл. 9.
Таблица 9
Технические характеристики датчика момента на роторе ДМЦ-Т
|
Параметры |
Значение |
|
Диапазон измеряемых усилий, кН |
0–60 |
|
Диапазон изменения выходного сигнала, В |
0–10 (возможно 0–5) |
|
Основная приведенная погрешность измерения усилия, % |
±2 |
|
Диапазон рабочих температур, °С |
–40...+50 |
|
Напряжение питания, В |
+12...+15 |
|
Габаритные размеры датчика, мм |
600×200×390 |
|
Масса, кг |
70 |
Датчик ДМЭ
Датчик предназначен для контроля электрической мощности в цепи электропривода ротора буровой установки и служит для косвенного определения величины момента на роторе. Датчик момента на роторе ДМЭ используется в системе «Контур-2» и в составе различных станций геолого-технологических исследований (ГТИ) скважин (рис. 21), технические характеристики указаны в табл. 10.

Рис. 21. Общий вид датчика ДМЭ
Принцип действия основан на прямой зависимости величины момента на роторе буровой установки от величины тока в силовой части электропривода ротора. Ток, протекающий по одной фазе силового электрического кабеля питания электропривода ротора буровой установки, пропорционален выходному напряжению преобразователя тока. Использование в конструкции преобразователя тока сенсора на эффекте Холла позволяет измерять как переменный, так и постоянный токи в питающем кабеле. Напряжение постоянного и переменного токов модуль нормализации приводит к стандартному диапазону величин. Метод преобразования – измерение средневыпрямленного сигнала.
Таблица 10
Технические характеристики датчика момента на роторе ДМЭ
|
Параметры |
Значение |
|
Диапазон измерения тока, А |
0–1000 |
|
Погрешность измерений, % |
0,5 |
|
Род измеряемого тока |
Постоянный, переменный |
|
Метод электрического преобразования |
Компенсационный |
|
Диапазон изменения выходного сигнала, В |
0–10 |
|
Электрическая прочность изоляции, кВ |
6 |
|
Диапазон рабочих температур, °С |
–0...+65 |
|
Напряжение питания, В |
±15 |
|
Габаритные размеры датчика, мм |
178×105×75 |
|
Масса, кг |
1,8 |
Датчик устанавливается на силовой кабель фазы электропривода ротора буровой установки.
Датчик ДМР-Д
Датчик ДМР-Д для измерения крутящего момента на роторе буровых установок с угловым редуктором через измерение силы реакции опоры редуктора. Датчик момента на роторе ДМР-Д используется в системе СКМ «Ротор», в системе «Контур-2» и в составе различных станций геолого-технологических исследований (ГТИ) скважин (рис. 22).

Рис. 22. Общий вид датчика ДМР-Д
Принцип действия основан на том, что усилие, действующее на опорную пяту датчика, пропорционально моменту сопротивления вращению ротора. Это усилие вызывает упругую деформацию мембраны, на которой закреплены узлы дифференциального трансформатора (LVDT). При изгибе мембраны, возникающее рассогласование в обмотках трансформатора формирует электрический сигнал, пропорциональный величине деформации. При накоплении массива измеренных значений не менее 10 раз в секунду, микроконтроллер платы преобразования вычисляет усредненное значение сигнала и приводит его к стандартному диапазону величин.
Датчик ДМР-Д состоит из цилиндрического корпуса с упругой силовой мембраной и платы преобразования. Для передачи усилия на мембране установлена опорная пята. Механический изгиб упругой мембраны преобразуется в электрический сигнал с помощью дифференциального трансформатора (LVDT). Для установки на плоской поверхности датчик имеет монтажный фланец. Все составные части датчика выполнены из стали с антикоррозионным покрытием. Подключение к датчику осуществляется кабелем через металлический гермоввод. Датчик устанавливается на опору редуктора привода роторного стола и воспринимает усилие реакции опоры (сжатие), технические характеристики приведены в табл. 11.
Таблица 11
Технические характеристики датчика момента на роторе ДМР-Д
|
Параметры |
Значение |
|
Диапазон измеряемых усилий, кН |
0–60 |
|
Диапазон изменения выходного сигнала, В |
0–10 |
|
Диапазон рабочих температур, °С |
–40...+50 |
|
Напряжение питания, В |
+12...+15 |
|
Габаритные размеры датчика, мм |
120×120×190 |
|
Масса, кг |
7 |