
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
ДАТЧИКИ СИСТЕМ АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ БУРЕНИЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН
Васильев С. И., Лапушова Л. А.,
ДАТЧИК ОБОРОТОВ ВАЛА БУРОВОЙ ЛЕБЁДКИ
Предназначен для определения положения талевого блока, с целью: расчета глубины скважины в процессе бурения; расчета количества (длины) бурового инструмента находящегося в скважине; определения операции бурения; осложнений при бурении и спуско-подъемных операциях (СПО) (рис. 96).
а б
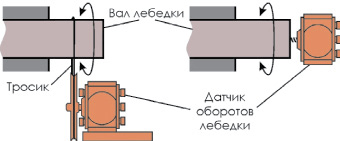
Рис. 96. Схема датчиков с преобразованием механических передвижений: а – с клиноременной передачей; б – с прямой передачей
Принцип работы – датчик преобразует угол поворота буровой лебедки в импульсы, прямо пропорциональные перемещениям крюкоблока (талевого блока). Импульсы преобразуются в высоту положения талевого блока относительно стола ротора. Преобразование в существующих станциях ГТИ путем линейной и кусочно-линейной калибровки. Кусочно-линейная считается более перспективной, за счет того, что учитывает слой лебедки на барабане (более точное определение передвижений между верхней и нижней положениями).
Типы датчиков для измерения числа оборотов вала буровой лебедки:
■ датчики магнитного типа (измерение импульсов при прохождении магнитных меток, расположенных на вале лебедки/кронблоке, через датчик с магнитоуправляемым контактом). При установке датчиков данного типа на кронблоке, не требуется перекалибровка при перетяжке каната, но возникают проблемы при поломках датчика (требует остановки бурения)
■ датчики преобразования механических передвижений.
Преобразование механических передвижений осуществляется либо через непосредственную передачу оборотов вала на чувствительный элемент или с помощью клиноременной передачи (через резиновый или пружинный ремень). Датчики с непосредственной передачей обладают лучшими характеристиками исключающими обрывы, растяжения и проскальзывания передаточного элемента.
Чувствительными элементами обычно выступают магнитные датчики (геркон и т.п.), датчики основанные на эффекте Холла и оптические датчики. Оптические датчики считаются наиболее точными, магнитные – наименее (сильная зависимость от установки магнитных элементов – количества, соблюдение шага дискретности и т.д.).
По способу крепления датчики оборотов подразделяются на три типа:
■ датчик, устанавливаемый на станине буровой лебедки (магнитного типа, типа преобразования механических передвижений);
■ датчик, устанавливаемый на талевом блоке (магнитного типа);
■ датчик, устанавливаемый напрямую на вал лебедки (преобразование механических передвижений).