
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
4.5. Сравнительный анализ алгоритмов классификации, основанных на векторе достаточных статистик, в условиях априорной неопределённости
Как показано в главе 2, использование в качестве вектора признаков вектора достаточных статистик приводит к алгоритму (3.2.29). Применение этого алгоритма возможно в условиях, когда ракурс ПРЦ и соответствующий набор, по крайней мере, усреднённых радиолокационных портретов, известен, и банк данных таких РП сформирован. Последнее условие в большинстве практических ситуаций, как правило, не выполняется, что приводит к необходимости использовать признаки и алгоритмы, основанные на ограниченных сведениях о РП ПРЦ и условиях наблюдения. Сравнительный анализ эффективности ряда таких алгоритмов и является предметом обсуждения в данном разделе.
В дальнейшем считаем, что каждый отсчет РЛИ формируется как значение мгновенной мощности после когерентного суммирования в пределах всего времени, выделенного на синтезирование апертуры. При этом каждый такой отсчет имеет (в простейшем случае, когда отражения от поверхности ПРЦ содержат только диффузионную составляющую) экспоненциальную плотность вероятности:
 (4.5.1)
(4.5.1)
В формуле (4.5.1) приняты следующие обозначения:  – i-й отсчет РЛИ, i – номер отсчета изображения, которое представляет собой двумерное дискретное множество Ωm,
– i-й отсчет РЛИ, i – номер отсчета изображения, которое представляет собой двумерное дискретное множество Ωm,  – ожидаемое отношение сигнал/шум в i-м отсчете при условии, что наблюдается цель k-го класса при ракурсе φ.
– ожидаемое отношение сигнал/шум в i-м отсчете при условии, что наблюдается цель k-го класса при ракурсе φ.
Если отсчеты статистически независимы, то логарифм отношения правдоподобия имеет вид
 (4.5.2)
(4.5.2)
При внешней простоте алгоритма (4.5.1)–(4.5.2) его практическая реализация, как уже упоминалось выше, неосуществима в связи с чрезвычайно громоздким перебором возможных значений опорных функций (по сути такие функции – распределения ЭПР по координатам ПРЦ).
В связи с этим введем ряд предположений, которые не носят характера принципиальных ограничений и позволяют вносить изменения, упрощающие реализацию алгоритма. Сформулируем предположения, принятые при анализе.
1. ПРЦ разделяются на три класса, отличающиеся по ЭПР и размерам. Суммарная ЭПР k-го класса равна  .
.
2. Зависимость общей ЭПР цели от ракурса аппроксимируется зависимостью
 (4.5.3)
(4.5.3)
где значение b = 0,9/(π/2)2 принято из эмпирического условия, заключающегося в том, что при изменении ракурса от 0 до 90 величина ЭПР меняется приблизительно на 10 дБ [10].
3. Распределение ЭПР по площади цели считается равномерным
 (4.5.4)
(4.5.4)
где Sk(φ) – количество отсчетов цели k-го класса при ракурсе φ.
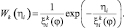
Рис. 4.10. Примеры РЛИ ПРЦ
Таблица 4.1
|
№ п/п |
Разрешение (м) |
ЭПР МП (дБ) |
Ракурс |
Р |
|
1 |
2 |
3 |
4 |
5 |
|
1 |
12 |
–30 |
0° |
|
|
45° |
|
|||
|
90° |
|
|||
|
2 |
12 |
–20 |
0° |
|
|
45° |
|
|||
|
90° |
|
|||
|
3 |
12 |
–10 |
0° |
|
|
45° |
|
|||
|
90° |
|
|||
|
1 |
2 |
3 |
4 |
5 |
|
4 |
24 |
–30 |
0° |
|
|
45° |
|
|||
|
90° |
|
|||
|
5 |
24 |
–20 |
0° |
|
|
45° |
|
|||
|
90° |
|
|||
|
6 |
24 |
–10 |
0° |
|
|
45° |
|
|||
|
90° |
|


















4. Все элементы РЛИ, не занятые целью, представляют собой отсчеты фона, который имеет одинаковую удельную ЭПР. Отношение мощностей сигнала от фона и шума – gФ.
5. Оценка ракурса φ производится после бинарного квантования РЛИ путем измерения параметров прямой, для которой СКО расстояний до точек множества параметров РЛИ НЦ, полученных после бинарного квантования, минимально.
С учетом этих предположений оптимальный алгоритм принимает вид
 (4.5.5)
(4.5.5)
где – Ωk(φ) область РЛИ, занимаемая ПРЦ k-го класса при ракурсе  .
.
Содержание алгоритма (4.5.5) заключается в следующем.
1. Сформированный кадр РЛИ подвергается бинарному квантованию для отсечения фона. По полученному множеству точек производится оценка ракурса φ. Порог квантования выставляется по уровню ложной тревоги. Уровень порога подбирается при анализе.
2. В соответствии с априорной информацией о размерах и ЭПР НЦ каждого k-го класса рассчитываются:
а) размеры области  , занимаемой целью k-го класса при ракурсе
, занимаемой целью k-го класса при ракурсе  ;
;
б) число точек  , приходящихся на цель k-го класса при ракурсе
, приходящихся на цель k-го класса при ракурсе  (число точек, входящих в состав
(число точек, входящих в состав  ;
;
в) ожидаемое значение параметра  для k-го класса при ракурсе
для k-го класса при ракурсе  .
.
3. Отсчеты РЛИ в пределах области  суммируются.
суммируются.
4. Вычисляется выражение в фигурных скобках формулы (3.5.5) и принимается решение в пользу того класса ПРЦ, для которого полученное выражение минимально.
Высокая эффективность полученного алгоритма (результаты соответствующего анализа обсуждаются ниже) достигается за счет практически полного учета всей доступной и достоверной априорной информации – размеров, конфигурации областей, занимаемых ПРЦ разных классов, их ЭПР при оцененном ракурсе.
В этой связи представляется целесообразным провести сравнительный анализ оптимального алгоритма с рядом других, зависящих от априорной информации в меньшей степени, чем это необходимо для алгоритма (4.5.5).
Перечислим алгоритмы, которые сравнивались с (4.5.5).
1.  (4.5.6)
(4.5.6)
2.  (4.5.7)
(4.5.7)
3.  (4.5.8)
(4.5.8)
4.  (4.5.9)
(4.5.9)
5.  (4.5.10)
(4.5.10)
6.  (4.5.11)
(4.5.11)
7.  (4.5.12)
(4.5.12)
8.  (4.5.13)
(4.5.13)
где  – оценка суммарной мощности в пределах области РЛИ, где отсчеты ηi превышают порог Н, установленный по уровню мощности фона;
– оценка суммарной мощности в пределах области РЛИ, где отсчеты ηi превышают порог Н, установленный по уровню мощности фона;  – та же оценка, пересчитанная к нулевому ракурсу; Sk – среднее число точек, приходящихся на цель k-го класса;
– та же оценка, пересчитанная к нулевому ракурсу; Sk – среднее число точек, приходящихся на цель k-го класса;  – число точек, соответствующих цели k-го класса при условии, что ракурс равен
– число точек, соответствующих цели k-го класса при условии, что ракурс равен  ;
;  – оценка размеров ПРЦ – число отсчетов РЛИ, превысивших порог.
– оценка размеров ПРЦ – число отсчетов РЛИ, превысивших порог.
В приведенном перечне алгоритмов простейшими, не использующими оценок ракурса, являются алгоритмы 1–3. Наиболее сложным, учитывающим изменение и ЭПР, и размеров при вариациях ракурса, является алгоритм 8. По существу, он отличается от оптимального лишь тем, что не требует априорного знания области РЛИ, занимаемой ПРЦ каждого класса при всех допустимых ракурсах. Алгоритмы 4–7 занимают промежуточное положение.
Сравнение эффективности перечисленных выше алгоритмов производилось методом статистического моделирования на гипотетических тестовых РЛИ, имеющих разрешающую способность порядка 25 м. Мощность фона соответствует подстилающей поверхности с удельной ЭПР 20 дБ. Радиолокационные портреты простейших НЦ формировались для 5 опорных ракурсов в пределах от 0 до 90 градусов. Конкретные ракурсы цели задавались случайными, равновероятными. Порог для отсечения фона устанавливался на уровне, при котором вероятность его превышения отдельным отсчетом фона не превышала 0,01.
Результаты сравнительного анализа выбранных девяти алгоритмов приведены на рис. 4.11. По оси абсцисс отложено отношение мощности сигнала, отраженного «малым» ПРЦ, к мощности фона в пределах площади, занимаемой целью. Общее количество распознаваемых классов равно 3, причем цели разных классов отличаются по ЭПР на 3 дБ, а по площади на 50 %.
Как следует из полученных результатов, основной алгоритм (4.5.5) обладает существенно более высокой эффективностью. Следующую по качеству группу алгоритмов занимают те, которые используют адаптивную оценку ракурса для выбора интегральной ЭПР каждого класса целей, соответствующей оцененному ракурсу. И, наконец, наименее эффективны алгоритмы, использующие различия в размерах, но пренебрегающие информацией о различиях в ЭПР различных классов ПРЦ.
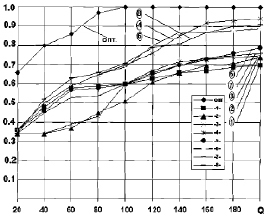
Рис. 4.11. Сравнение алгоритмов классификации