
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
5.2. Оценка области, занимаемой целью на РЛИ
Выделение области, занимаемой радиолокационным портретом ПРЦ на РЛИ, представляет собой известную задачу сегментации, методам решения которой посвящен ряд работ, в частности [3–12, 13]. Традиционные алгоритмы сегментации реализуют такие методы, как пространственное дифференцирование, функциональная аппроксимация, высокочастотная фильтрация, пороговая обработка, двумерная линейная фильтрация и т.д. Практическое применение рассматриваемых методов в задаче распознавания ПРЦ на борту КА вряд ли осуществимо, в первую очередь, из-за их вычислительной сложности, с одной стороны, и из-за необходимости экспериментального подбора параметров (настройки алгоритмов с помощью оператора), с другой. Существенный недостаток традиционных алгоритмов – недостаточное внимание к принципиальной необходимости учета флуктуации РЛИ ПРЦ, а также к формализации методов анализа их эффективности и результатам такого анализа.
Указанные недостатки могут быть преодолены при разработке алгоритма сегментации на основе статистической модели РЛИ с использованием аппарата и методологии теории статистических решений.
Хорошей моделью для РЛИ в РСА с достаточно высоким разрешением может служить двумерное поле независимых отсчетов мощности отраженного сигнала, одномерные плотности вероятности которых отличаются для отсчетов, соответствующих отражениям от фона и от поверхности ПРЦ. В первом приближении примем допущение о том, что все отсчеты фона имеют плотность вероятности WФ(Uij), а цели – WЦ(Uij). В этом случае оптимальный алгоритм оценивания области, занимаемой отсчетами цели, записанный по критерию максимального правдоподобия, будет иметь вид:
 (5.2.1)
(5.2.1)
Реализация алгоритма (4.2.1) является чрезвычайно трудоемкой из-за необходимости перебора всех возможных границ области, внутри которой расположена цель. Однако, с учетом статистической независимости сигналов в отдельных каналах дальности, максимум выражения в фигурных скобках (4.2.1) может быть получен, если максимизировать каждое отдельное слагаемое
 (5.2.2)
(5.2.2)
для каждого канала дальности с номером j (n1j и n2j – граничные точки, разделяющие область фона и цели в j-м канале дальности). Таким образом, оптимальный алгоритм определения области, занимаемой целью, сводится к оптимальной оценке совокупности пар точек в каждом канале дальности, в которых происходит изменение параметра распределения отсчетов сначала в «направлении фон-цель», а затем в «направлении цель-фон».
Оптимальный по максимуму функции правдоподобия алгоритм нахождения оценок координат граничных точек  и
и  в j-м канале дальности принимает вид:
в j-м канале дальности принимает вид:
 (5.2.3)
(5.2.3)
Совокупность граничных точек n1j, n2j при каждом значении j образуют границу области Ω, занимаемой целью соответствующего класса.
Определим структуру оптимального алгоритма для некоторых наиболее распространенных видов распределений одномерной плотности вероятности отсчетов РЛИ.
а) Распределение отсчетов РЛИ – экспоненциальное:
 (5.2.4)
(5.2.4)
причем его параметр σ пропорционален удельной ЭПР цели (σ2) или фона (σ1) в зависимости от того, расположен ли соответствующий отсчет в области цели ΩЦ или фона ΩФ. При известных априори значениях параметров σ1 и σ2 алгоритм (4.2.3) может быть записан в виде:
 (5.2.5)
(5.2.5)
При неизвестных значениях параметров σ1 и σ2 функция правдоподобия в каждом канале дальности может быть определена по формуле (5.2.5), где вместо названных параметров используются их максимально правдоподобные оценки при каждом возможном значении координат граничных точек n1 и n2. В этом случае алгоритм оценки координат граничных точек принимает вид:
 (5.2.6)
(5.2.6)
и может быть назван адаптивным по отношению к параметрам распределения.
б) Распределение отсчетов РЛИ – гамма-распределение:

с параметрами γ2, η2 в области цели и параметрами γ1, η1, в области, занятой фоном.
Рассмотрим два варианта:
1) на границе областей изменяется только параметр масштаба γ(η2 = η1 = η). В этом случае алгоритм оценки граничных точек имеет вид:
 (5.2.7)
(5.2.7)
2) на границе областей изменяется только параметр формы η (γ2 = γ1 = η0). Алгоритм выглядит следующим образом.
 (5.2.8)
(5.2.8)
Реализация рассмотренных алгоритмов не требует операций более сложных, нежели простое суммирование отсчетов РЛИ.
Действительно из выражения (3.5) следует, что достаточной статистикой при решении задачи многоальтернативной проверки гипотез о линейных размерах объекта является вектор, компонентами которого являются суммы отсчётов в пределах ожидаемых размеров объекта. В дальнейшем вектор обозначен

где 

 Ui,j – отсчёты изображения; ΩL, ΩM, ΩB – области изображения, занимаемые «малой», «средней» и «большой» целями.
Ui,j – отсчёты изображения; ΩL, ΩM, ΩB – области изображения, занимаемые «малой», «средней» и «большой» целями.
Основной статистический материал, используемый для исследования алгоритмов распознавания, получен путём моделирования двумерных РЛИ, адекватных полю сигнала на выходе устройства обработки в станции бокового обзора с синтезированной апертурой [9]. Наблюдаемый объект моделируется с помощью отдельных блестящих точек и диффузионной составляющей. Распознаваемые классы отличаются размерами. Число классов равно трём. На рис. 5.3. представлен пример радиолокационного изображения, содержащего отдельные объекты, отличающиеся своими размерами, которые следует классифицировать по названному параметру.
Принимаемый сигнал формируется на выходе РЛС с синтезированной апертурой (рис. 5.4) и представляет собой совокупность случайных отсчётов, имеющих экспоненциальной распределение с заданной дисперсией в пределах области, занимаемой целью на изображении.
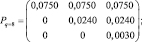
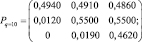
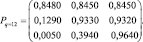
В результате моделирования алгоритма классификации, описанного выше, получены вероятности правильного распознавания для РЛИ, отличающихся размерами в 1,5 раза
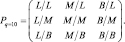 (5.2.9)
(5.2.9)
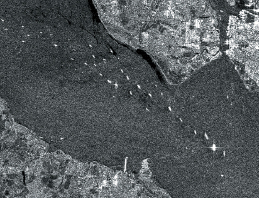
Рис. 5.3. Пример радиолокационного изображения
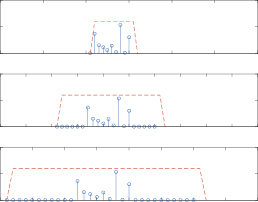
Рис. 5.4. Отсчёты изображений целей 3 классов, отличающихся размерами
Каждый элемент матрицы представляет собой оценку вероятности правильной (ошибочной) классификации малых (L), средних (M) и больших (B) целей При разных отношениях мощностей отсчётов, принадлежащих целям, к мощности шума.
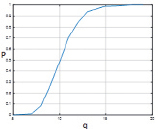
На рис. 5.5 представлены зависимости вероятностей правильной классификации от отношения сигнал/шум и числа отсчётов сигнала, приходящихся на цель.
 а
а 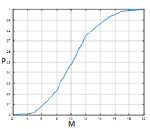 б
б
Рис. 5.5. Зависимость вероятности правильного обнаружения: а – M = const; б – q = const; P – вероятность правильного обнаружения; q – отношение сигнал-шум; M – количество отсчетов цели