
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
5.7.1. Разработка алгоритма
В работах [15, 16], посвящённых проблемам обработки сигналов в радиолокационной станции с синтезированной апертурой (РСА), основное внимание уделялось исследованию алгоритмов обнаружения при действии помех, вызванных отражениями от подстилающей поверхности и шумом. В ряде практических ситуаций вместе с полезным сигналом, отраженным от многоэлементной цели, в диаграмме направленности (ДН) РСА могут присутствовать достаточно мощные помеховые сигналы, вызванные отражениями от мешающих объектов. В этих случаях алгоритм обработки должен строиться с учётом, как распределённого характера цели, так и наличия помех. Определение основных принципов построения таких алгоритмов и методов их анализа составляет содержание данной работы.
Предположим, что РСА бокового обзора перемещается по прямолинейной траектории. Полезные и мешающие сигналы в одном элементе разрешения по дальности формируются отдельными отражателями, отстоящими на расстоянии  и
и  от начала координат с шагом Δd, причём n и N – числа сигнальных и помеховых отражателей соответственно (рис. 5.15). При дискретной во времени обработке вектор наблюдаемых данных может быть представлен в следующем виде:
от начала координат с шагом Δd, причём n и N – числа сигнальных и помеховых отражателей соответственно (рис. 5.15). При дискретной во времени обработке вектор наблюдаемых данных может быть представлен в следующем виде:
Y = βTAT + βСAС + NN, (5.7.1)
где βT – матрица M×n:
 (5.7.2)
(5.7.2)
состоящая из векторов
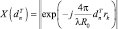 (5.7.3)
(5.7.3)
задающих фазовое распределение сигнала, отражённого от i-го элемента цели, по точкам синтезированной апертуры, имеющим координаты rk,  , (λ – длина волны); AT и AС – векторы комплексных амплитуд сигналов и помех размерностью n×1 и N×1 соответственно, представляющие собой нормальные случайные величины с нулевыми математическими ожиданиями и дисперсиями
, (λ – длина волны); AT и AС – векторы комплексных амплитуд сигналов и помех размерностью n×1 и N×1 соответственно, представляющие собой нормальные случайные величины с нулевыми математическими ожиданиями и дисперсиями  и
и  соответственно; матрица βС определяется аналогично (2) и (3), NN – вектор комплексных амплитуд гауссовского шума.
соответственно; матрица βС определяется аналогично (2) и (3), NN – вектор комплексных амплитуд гауссовского шума.
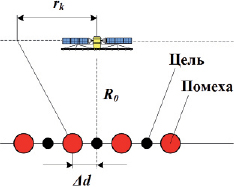
Рис. 5.15. Геометрия задачи
При записи наблюдаемых данных в виде (5.7.1) достаточной статистикой для обнаружения полезного сигнала является квадратичная форма
α = Y*TθY, (5.7.4)
где  – весовая функция обработки,
– весовая функция обработки,
 (5.7.5)
(5.7.5)
 (5.7.6)
(5.7.6)
где RTC и RC – корреляционные матрицы вектора (5.7.1) при наличии и отсутствии полезного сигнала соответственно,
 (5.7.7)
(5.7.7)
 (5.7.8)
(5.7.8)
 (5.7.9)
(5.7.9)
где * – комплексное сопряжение; T – знак транспонирования; E – единичная матрица, без ограничения общности в дальнейшем считаем дисперсию шума  .
.
Используя равенство Вудбери для определения оптимальной весовой функции, запишем выражение достаточной статистики в виде
α = Z*T PZ, (5.7.10)
где  (5.7.11)
(5.7.11)
 (5.7.12)
(5.7.12)
 (5.7.13)
(5.7.13)
 (5.7.14)
(5.7.14)
где plt – элемент матрицы (5.7.11).
Структурная схема, реализующая оптимальный алгоритм (5.7.10), показана на рис. 5.16.

Рис. 5.16. Структурная схема оптимального алгоритма
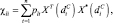
Основная функциональная операция, входящая в (5.7.13):
 (5.7.15)
(5.7.15)
представляет собой ЛЧМ-демодуляцию и дискретное преобразование Фурье, вычисляемое для пространственных частот 2di/λR0, соответствующих всем элементам цели (помех).