
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания

Применение метода исключения варьируемого параметра при решении задач диагностирования
Портнягин Н. Н., Пюкке Г. А.,
3.3. Построение области работоспособных состояний
Для построения области работоспособных состояний ОД используется методика, основанная на представлении диагностируемой схемы системой изовар с последующим применением процедуры адаптации полученной модели к множеству точек двумерного пространства диагностирования. При этом непрерывно проверяются условия выхода точки из зоны работоспособных состояний. Для реализации алгоритма построения области работоспособных состояний в двумерном пространстве прямых диагностических признаков {Kmn ; Kkp } с помощью соотношений:
Kkp = K0 kp + ρ Cos φ ; Kmn = K0 mn + ρ Sin φ,
где K0 kp и K0 mn - координаты точки равновесного состояния ОД, задается множество точек при изменении 0 ≤ φ < 2π и 0 < ρ < 1, где φ – угол поворота радиуса ρ, которые связаны соотношением:
ρ = ![]() (Kkp – K0 kp ) 2 + (Kmn – K0 mn )2 .
(Kkp – K0 kp ) 2 + (Kmn – K0 mn )2 .
Задается шаг изменения Δφ при ρ = ρ1 = соnst , и после перебора всех значений φ воспроизводится серия точек (кольцо). Далее изменяется ρ на величину Δρ, и после перебора всех значений φ воспроизводится следующая серия точек и т. д. При этом для каждой точки серии выполняется программа адаптации. Полученный после каждой адаптации вектор численных значений проводимостей всех СЕ сравнивается с заданным вектором допустимых значений проводимостей СЕ, и если разность одноименных компонент этих векторов (хотя бы в одной компоненте) меньше допустимогоΔg i, то точка зоны работоспособности выставляется в пространстве диагностирования. Если же эта разность больше допустимого Δgi, то точка не выставляется. В результате перебора всех точек при изменении φ и ρ в установленных пределах образуется область допустимых значений прямых диагностических параметров, при которых контролируемые параметры остаются в допустимых пределах . При выходе хотя бы одного из контролируемых параметров за допустимые пределы, точка текущего состояния выйдет за пределы зоны работоспособности.
При диагностировании измеряются координаты точки текущего состояния Kmn и Kkp и устанавливается ее принадлежность области работоспособных состояний. В качестве примера рассмотрим процедуру построения области работоспособных состояний силового стабилизатора, используемого для питания судового тренажерного комплекса. Стабилизатор в качестве управляющего органа содержит симисторы, включенные в секции вторичной обмотки силового трансформатора. Симисторы открываются и закрываются по управляющему электроду с помощью импульсов, поступающих от схемы управления и в зависимости от уровня напряжения бортовой сети производят коммутацию дополнительных секций вторичной обмотки силового трансформатора, поддерживая напряжение на выходе в заданных пределах.
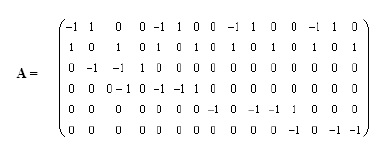
В процессе эксплуатации стабилизатора возникла необходимость периодического контроля работоспособности коммутирующих симмисторов по методике косвенного контроля без нарушения структуры схемы. Такая необходимость была продиктована особенностью построения принципиальной схемы стабилизатора. Как правило, при длительной эксплуатации менее надежными элементами устройства оказывались симмисторы. При пробое одного из симмисторов система без явных признаков наличия дефектов сохраняла работоспособность неопределенное время до наступления очередного изменения уровня напряжения. При изменении напряжения включался следующий симмистор и секции вторичной обмотки трансформатора замыкались накоротко. Возникла необходимость разработки устройства, позволяющего регистрировать нарушение работоспособности любого элемента схемы. Для разработки устройства была использована методика построения области работоспособности методом исключения варьируемого параметра. Для построения области работоспособных состояний диагностируемую часть схемы представляется в виде схемы замещения (Рис. 3. 3). На основе схемы замещения записываем матрицу инциденций электрической цепи и диагональная матрица проводимостей: Y = diag ( 0, 01; 333; 0, 01; 100; 0, 01; 333; 0, 01; 100; 0, 01; 333; 0, 01: 100: 0, 01; 333; 0, 01), которые служат исходными данными для выполнения программы OTBOR 900,позволяющей сформировать массив прямых диагностических признаков и реализовать алгоритм поиска чувствительных каналов с использованием комплексного критерия Z. После выполнения программы в качестве оптимальных были выбраны каналы с полюсами: 1-3, 1-2 - входные и выходные полюсы первого канала, соответственно, 1-4, 1-2 – входные и выходные полюсы второго канала.
На основе полученных данных производится адаптация модели с помощью программы ADAP900 (Приложение 15), которая включает построение диагностической модели и ее адаптацию. После введения в программу, измеренных на ОД, численных значений функций передачи каналов диагностирования: K13-12* = 0, 17; K14-12* = 0, 19 и выполнения программы записывается вектор уточненных значений проводимостей СЕ:
Y = diag(0, 1; 343; 0, 1; 100; 0, 1; 229; 0, 09; 13,3; 0, 12; 333; 0, 001; 298; 0, 106; 333; 0, 05). Далее строится зона работоспособных состояний. В пространстве диагностирования разворачивается полярная система координат, с помощью которой производится оценка заданной серии контролируемых состояний. Оценка включает процедуру адаптации модели в каждой точке состояния и контроля выполнения условия работоспособности: gi min ≤ gi ≤ gi max ; i = 1, m, где: gi – i – я компонента вектора контролируемых параметров; gi max, gi min – соответственно, верхние и нижние границы допустимых значений компонент вектора уточненных проводимостей Y = diag . Для построения зоны работоспособных состояний используется программа DIAG900 (Приложение 16), после выполнения которой получаем карту диагностирования.
Контроль технического состояния ОД будет сводиться к измерению значений выходных напряжений двух каналов прохождения тестового сигнала, и определению положения точки состояния в пространстве диагностирования. Выход полученной точки за пределы области работоспособных состояний будет свидетельствовать о том, что хотя бы один из контролируемых параметров вышел за допустимые пределы. Например, при разработке диагностического обеспечения на выпрямитель переменного тока были получены компоненты уточненного вектора проводимостей СЕ:
Y1 = diag (10, 2; 79; 106; 139; 25; 36),соответствующие точке состояния с координатами К41-23* = -0, 3; К42-12* = 0, 5, там же после выполнения программы OTBOR 161B были получены номера полюсов каналов диагностирования: 2-4, 1-4; 1-2, 1-3. Полученные данные являются исходными для решения задач поиска множественных дефектов и определения степени работоспособности ОД. Например, если в момент диагностирования выпрямителя переменного тока были измерены новые координаты точки состояния: К24-14* = -0,35; К12-13 = 0, 45 (измененные значения координат свидетельствуют об изменении параметров СЕ), то после выполнения программы ADAP 400 становятся известными численные значения проводимостей структурных единиц ОД: Y2 = diag (11,7; 88,8; 109, 2; 264; 29, 6; 14, 8). На рис. 3. 5 приведена карта адаптации и значения проводимостей структурных единиц умноженные на 10-5 См. При переборе всех возможных путей перемещения точки состояния к точке с координатами, измеренными на ОД выявляется вектор параметров компонент наиболее близкий к исходному.
Далее находится вектор разности, позволяющий судить о численном значении отклонения параметров для каждой СЕ: Y = diag (1, 5; 9, 8; 3, 2; 125; 4, 6; 21, 2).
Следует отметить, что обозначенная процедура диагностирования, включающая измерительные, вычислительные и графические операции, не всегда удобна в обращении при практическом диагностировании. Метод дает хорошие результаты, если отклонения точки состояния от точки измеренных координат достаточно малы. Поэтому необходима разработка более устойчивых алгоритмов и более совершенных методов диагностирования. Далее рассмотрим вероятностные диагностические модели.