
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
АВТОПРОЕКТИРОВАНИЕ ГОРНЫХ МАШИН В 3D: ПРОЕКТНО-МОДЕЛЬНЫЙ ПОДХОД
Бейсембаев К. М., Жолдыбаева Г. С., Дёмин В. Ф., Малыбаев Н. С., Шманов М. Н.,
6.2. Разработка комбайна для выемки камер
Разработка относится к горному делу и может быть использовано для выемки пластов, в частности при камерной технологии.
На рис. 6.3 изображен агрегат, план;
на рис. 6.4 – то же, вид с боку;
на рис. 6.5 – разрез А-А на рис. 92;
на рис. 6.6 – вид в плане при опережающей работе одной из отбойных головок в положении, когда она перекрывает забой соседней отбойной головки (пунктирные линии).
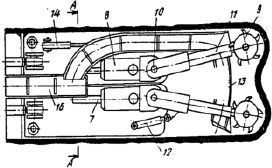
Рис. 6.3. Вид сверху
Выемочный агрегат содержит механизированную крепь, состоящую из секций 1 перекрытий 2 на гидроопорах 3 и основания 4, состоящего из двух частей, каждая из которых имеет гидродомкраты подачи 5, закрепленные на каждой части основания 4 и последующих секциях крепи 11 посредством шарнира 6, и выемочную машину. На каждой части основания 4 выполнены направляющие 7, в виде пазов, расположенных вдоль продольной оси выработки. На направляющих 7 установлены и зафиксированы приводы 8 исполнительных органов выемочной машины, состоящих из отбойных головок 9, закрепленных на рукоятях 11, шарнира 10, связанных с приводом 8 и установленных с возможностью перемещения в горизонтальной плоскости посредством гидродомкратов 12. На основании установлен скребковый погрузчик 13 с гидроцилиндром управления 14 и захватами 15, связанный с конвейером 16. Обе части основания 4 подвижно соеденены между собой посредством выполненных на каждой части основания 4 со стороны соединяемых частей Г-образных выступов 17 и ответной формы захватов 15 погрузчика 13. Каждая часть основания 4 установлена с возможностью перемещения одна относительно другой минимум на величину диаметра отбойной головки 9, а погрузчик 13 установлен с возможностью перемещения на шаг, равный шагу перемещения частей основания 4. Работа устройства заключается в следующем.
В начальном положении отбойные головки 9 располагаются на одном уровне или одна из отбойных головок опережает другую на заданный шаг.
При этом погрузчик 13 находится на минимальном расстоянии от отбойных головок 9.
После включения гидродомкратов подачи 5 основание 4 подается на забой и осуществляется одновременная отбойка. Руда грузится погрузчиком 13 на конвейер 16 и далее транспортируется из камеры. Возможна также поэтапная работа, когда вначале подается одна часть основания 4, затем другая.При выходе из строя одного исполнительного органа (например, левого) осуществляется выдвижение до упора в погрузчик 13 правой части основания 4, после чего включается его отбойная головка 9, при этом руда отбивается при качании его рукояти 11 с помощью гидродомкрата 12 управления с таким углом, чтобы обеспечивалась выемка по всей ширине (рис. 6.6).
Как известно, при камерной технологии с целью уменьшения потерь возможна его выемка и при обратном ходе агрегата, для чего после отработки камеры на всю длину отбойные головки 9 гидродомкратом 12 раздвигаются в стороны и внедряются в боковые строны камеры на величину их захвата и производится выемка в обратном направлении. При аварии одного из исполнительных органов расширение камеры со стороны вышедшей из строя части затруднительно ввиду необходимости иметь более длинную рукоять 11 отбойной головки 9 или больше ее ход (что привело бы к громоздкой конструкции), поэтому привод 8, установленный в пазах 7, расфиксируется и отводится с помощью лебедки или других средств в заднее положение, а правая отбойная головка 1 доворачивается гидродомкаратом управления 12 и осуществляет расширение камеры. После выдвижения вперед одной из частей вокруг отставшей отбойной головки 9 создается свободное пространство, из которого можно осуществить ее осмотр и ремонт (замена зубков и т. д.). Части основания 4 с помощью боковых выступов 15 и захватов погрузчика 16 удерживают от разбегания при перемещении, чем достигается их направленное движение. Домкрат 14 служит для управления погрузчиком 13 и улучшения погрузки руды и отвода погрузчика 13 в случае необходимости из зоны работы исполнительного органа. Таким образом, увеличивается энерговооруженность выемочной машины, а значит производительность и надежность ее работы; обеспечивается отбойка руды в более эффективном режиме, поскольку возможна работа с опережением одной из отбойных головок при уступной форме забоя, что облегчает работу отстающей головки, работающей в отжатой зоне; обеспечивается взаимозаменяемость отбойных головок при выходе из строя одной из них, что существенно повышает надежность системы; обеспечивается свободный доступ для осмотра, ремонта и дооснащения исполнительного органа.
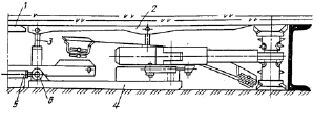
Рис. 6.4. Вид сбоку
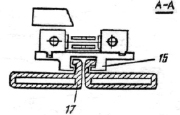
Рис. 6.5. Сечение А–А на рис. 97