
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
1.3.1 Способы определения резонансной скорости
Для эффективного разрушения ледяного покрова резонансным методом подводное судно необходимо перемещать подо льдом с резонансной скоростью, соответствующей максимальной амплитуде ИГВ. Значение этой скорости можно определить и поддерживать по максимуму гидростатического давления в носовой оконечности судна.
На рис.1.31 показан процесс реализации этого способа, в следующей последовательности. Подводное судно 1 подвсплывает на безопасное заглубление Н и начинает движение подо льдом со скоростью v.
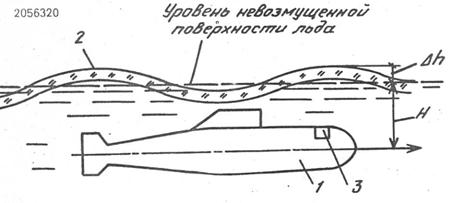
Рис.1.31.Способ разрушения ледяного покрова
По мере роста скорости на поверхности лед-вода начинают возникать и развиваться ИГВ 2, интенсивность которых оценивают с помощью датчика гидростатического давления 3, фиксирующего избыточное давление (чем больше амплитуда ИГВ, тем больше ∆h, т.е. величина гидростатического давления). Максимальное значение ∆h будет соответствовать резонансной скорости vр. Путем вышеописанных действий определяется режим с максимальным волновым сопротивлением и дальнейшее движение подводного судна продолжают с этой скоростью. Если скорость судна меньше или больше значения vр, то амплитуда ИГВ станет меньше и разрушение льда прекратится вследствие уменьшения волнового сопротивления. Таким образом, развив скорость vр, при которой датчик 3 показывает максимальное значение, судну, следующему в режиме разрушения льда, необходимо поддерживать скорость, равную vр [185].
Для повышения точности определения резонансной скорости предложено решение, в соответствии с которым резонансную скорость определяют и поддерживают по максимальному отклонению отраженного от ледяного покрова ультразвукового сигнала (рис.1.32).Упомянутую скорость определяют с помощью ультразвуковых сигналов, исходящих от излучателя 3, которые отражаются от ледяного покрова 1 и воспринимаются приемниками 4 - 7 ультразвуковых сигналов, для чего излучатель и приемники устанавливаются на верхней палубе судна 2, а резонансную скорость определяют по максимальному отклонению отраженного сигнала [186].
Очередной способ повышения точности определения резонансной скорости реализуется посредством перекладывания горизонтальных рулей 3 подводного судна 2 на углы атаки, при которых сила присоса Р корпуса будет наибольшей, а амплитуда ИГВ максимальной 4 (рис.1.33). Соответственно, по максимальной силе присоса и соответствующим углам перекладки рулей можно определить резонансную скорость, при которой разрушение сплошного льда происходит наиболее эффективно [187].
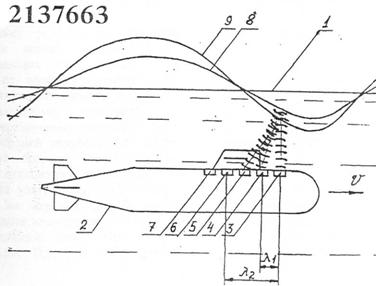
Рис.1.32.Способ определения резонансной скорости
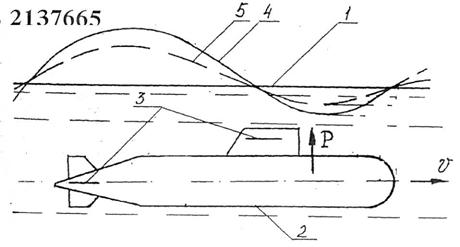
Рис.1.33.Способ определения резонансной скорости
Достичь повышения точности определения резонансной скорости можно установкой в носовой оконечности корпуса подводного судна датчиков гидродинамических давлений, измеряющих степень турбулентности пограничного слоя жидкости в верхней части судовой обшивки 4 (рис.1.34). Как только разница в показаниях датчиков 8 и 9 при движении подводного судна 2 подо льдом 1 достигнет максимума, то в ледяном покрове начнут распространяться резонансные ИГВ 3 [188].
Согласно другому способу, резонансную скорость определяют с помощью датчика, измеряющего интенсивность вибрации гребного винта подводного судна. Датчик устанавливают на валу гребного винта в кормовой части.
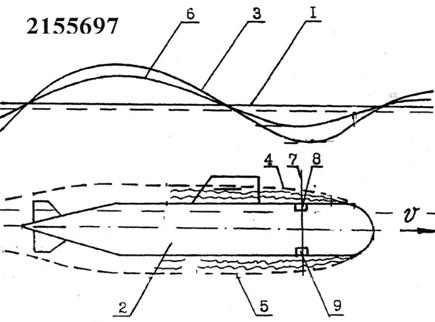
Рис.1.34.Способ поддержания резонансной скорости
И с его помощью более точно определяют скорость судна, при которой разрушение ледяного покрова будет происходить наиболее интенсивно [189].