
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
2.2. Опыты на упругих пленках
Для проверки возможности моделирования ИГВ в лабораторных условиях проводились эксперименты с резиновой пленкой, лежащсй на слое воды. Схема экспериментальной установки приведена на Рис.2.30.
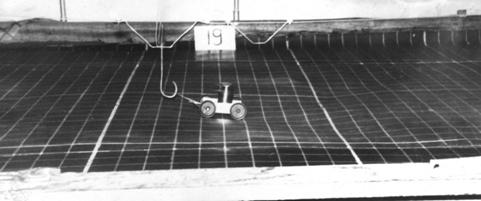
ИГВ возбуждались движущимся по пленке 7 грузом 5 (рис.2.31). Для обеспечения плавучести н свободного опирания резиновой пленки по периметру бассейна укладывались свободно перемещающиеся деревянные поплавки 8. Скорость буксировки груза регулировалась при помощи конусного вариатора 2 и изменением числа оборотов электродвигателя 4. Интересующий диапазон изменения скоростей, определяемый толщиной слоя воды, выбирался с учетом размеров бассейна так, чтобы сделать минимальным влияние отраженных волн на волновую систему около движущегося груза (рис.2.32).
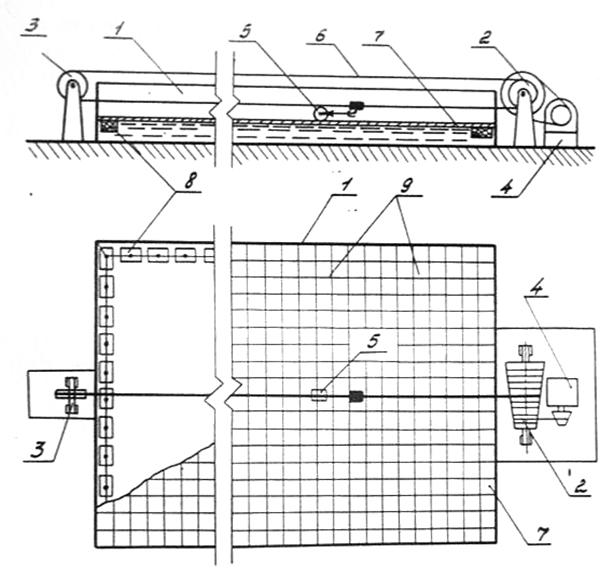
Рис.2.30. Схема экспериментальной установки: 1 - бассейн; 2 - конусный вариатор (носовой блок); З - кормовой блок; 4 - электродвигатсль 5 - буксируемый груз; 6 - бесконечный тросик; 7 - резиновая пленка; 8 - дсревянные поплавки; 9- разметка на пленке
 а)
а) 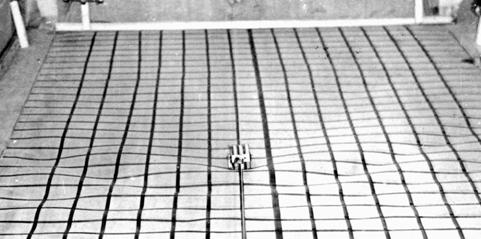 б)
б)
Рис.2.31. Характерные деформации упругой пленки, лежащей на слое воды под действием движущейся нагрузки: а) профиль ИГВ, б) фронт ИГВ
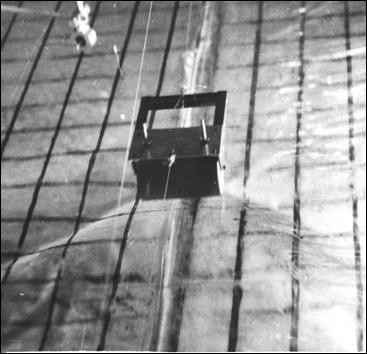
Рис.2.32. Фрагмент буксировки имитационной модели СВП
Характер колебаний пленки фиксировался при помощи фотосъемки. Соответствующая обработка фотоснимков позволила определить параметры возбуждаемых в бассейне ИГВ. На Рис.2.33 - 2.41 показаны характерные деформации упругой пленки, имитирующей сплошной лед при движении нагрузки с различными скоростями [39].
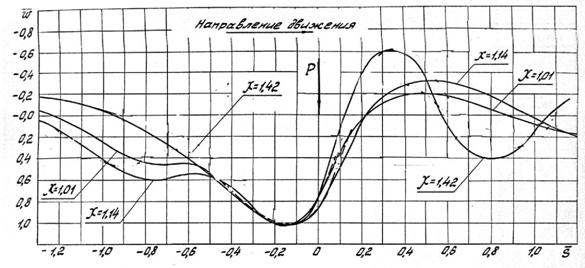
Рис.2.33.Кривые относительных деформаций модельного льда при движении нагрузки со скоростью χ
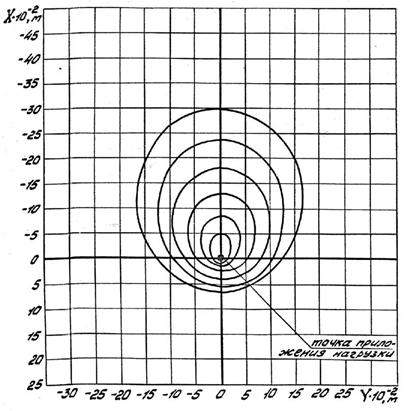
Рис.2.34.Линии равных прогибов пленки при докритической скорости нагрузки χ<1
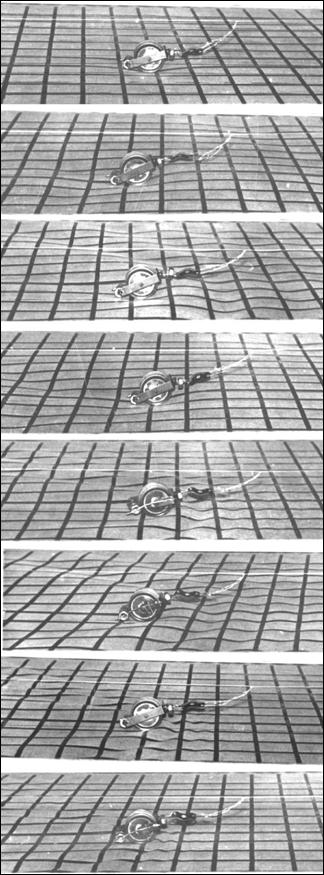
Рис.2.35.Изменение волновой картины с ростом скорости модели (статическое положение модели - верхний снимок)
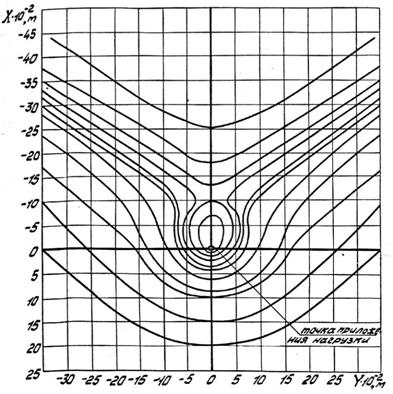
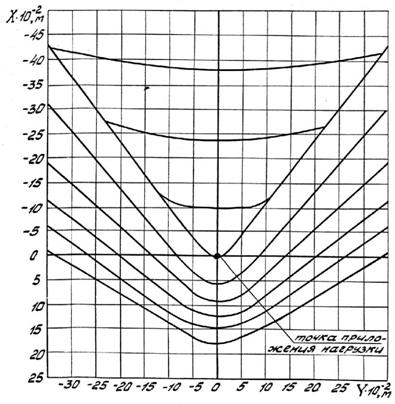
Рис.2.36.Линии равных прогибов пленки при скорости нагрузки, близкой к критической χ Рис.2.37.Линии равных прогибов пленки при сверхкрититческой нагрузки χ>1
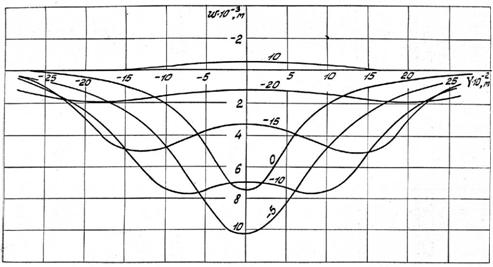
Рис.2.38.Кривые прогибов пленки в зависимости от Х при докритической скорости нагрузки
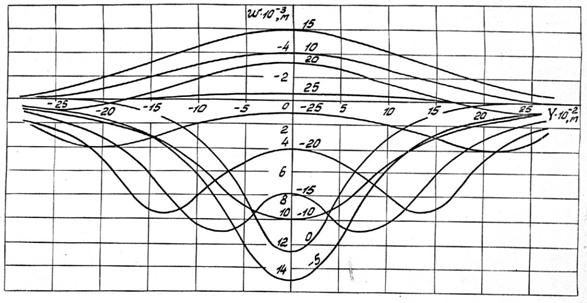
Рис.2.39.Кривые прогибов пленки в зависимости от Х при скорости нагрузки близкой к критической
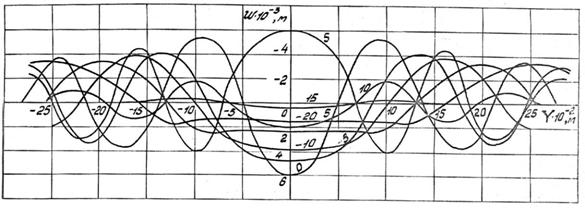
Рис.2.40.Кривые прогибов пленки в зависимости от Х при сверхкритической скорости нагрузки
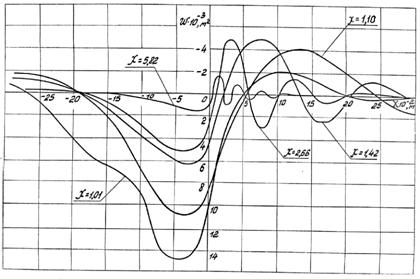
Рис.2.41.Профиль ИГВ в зависимости от скорости нагрузки χ
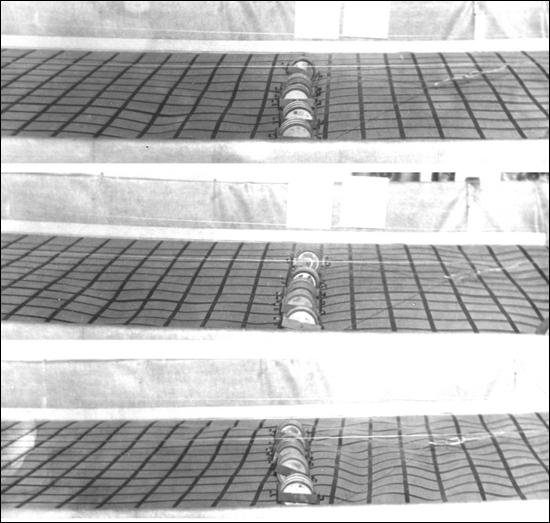
Рис.2.42. Движение моделей нагрузки фронтом на околорезонансном (а), резонансном (б) и сверхкритическом (в) режимах
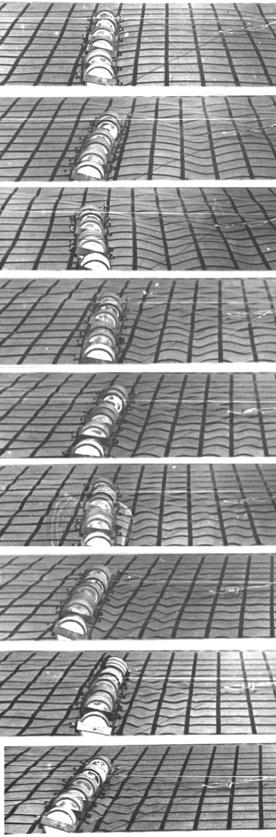
Рис.2.43. Интерференционная картина при движении моделей фронтом с возрастающей скоростью (верхний снимок соответствует нулевой скорости)
Дополнительно выполнялись исследования интерференции ИГВ при движении нескольких моделей фронтом и " в кильватер" (рис.2.42-2.45).
По результатам опытов был изучен общий характер деформаций модельного льда [37, 81]. Так, сравнительно просто удалось исследовать характер деформации упругой пластины, имитирующей ледяной покров, при Различных режимах движения нагрузки.
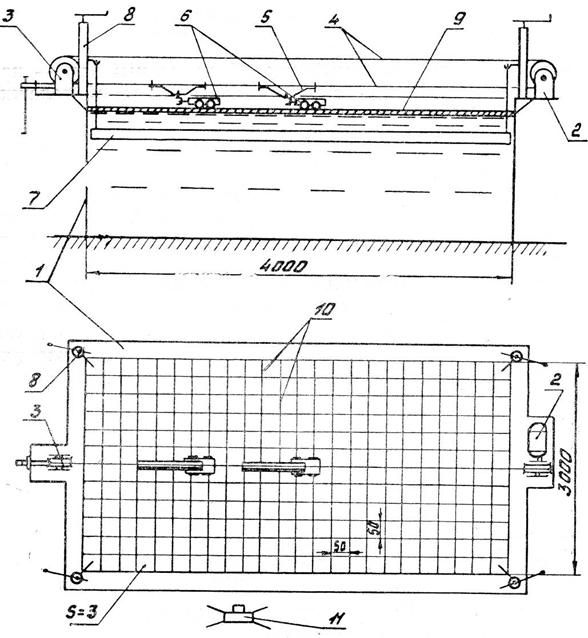
Рис.2.44. Схема установки для исследования интерференции ИГВ: 1 - бассейн; 2 - электродвигатель с ведущим блоком; 3 - ведомый блок с системой натяжения бесконечного тросика; 4 - бесконечный тросик; 5 - упряжка; 6 - буксируемые грузы; 7 - подвесное дно; 8 - винтовые подъемники подвесного дна; 9 - резиновая пленка; 10 - разметка на резиновой пленке; 11 - фотоаппарат
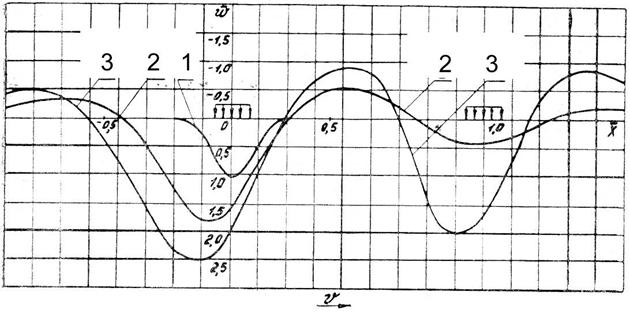
Рис.2.45.Кривые прогибов при ИГР: 1 - для статического нагружения; 2 - движение одиночной нагрузки; 3 - движение двух нагрузок
Исследование влияния формы движущейся по льду нагрузки на амплитуду возбуждаемых ИГВ были проведены в малом опытовом бассейне КнАГТУ (Рис.2.46, 2.47). Запись колебаний модельного льда осуществлялась с помощью ультразвукового датчика, интегратора и самописца. Для опытов по моделированию ИГВ была использована листовая резина с характеристиками Ем = 5 МПа; рм = 2300 кг/м3 и толщиной hм = 0,001 м , при этом модуль геометрического подобия составил около 1000.
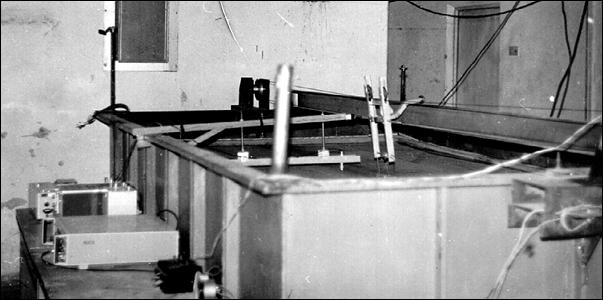
Рис. 2.46.Малый опытовый бассейн
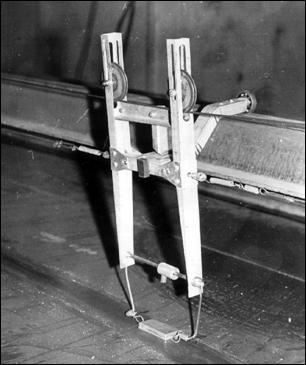
Рис 2.47.Буксировочная тележка
Модельные исследования были проведены для трех серий опытов. Модели первой серии имели форму прямоугольника с различным удлинением L/B. Во второй и третьей сериях эксперимента модели имели различную в плане форму нагрузки (Рис.2.48, 2.49).
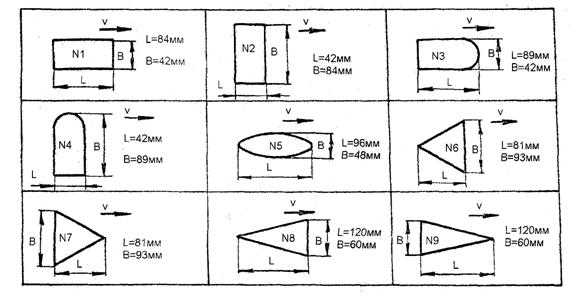
Рис. 2.48. Геометрическая форма и размеры моделей второй серии экспериментов
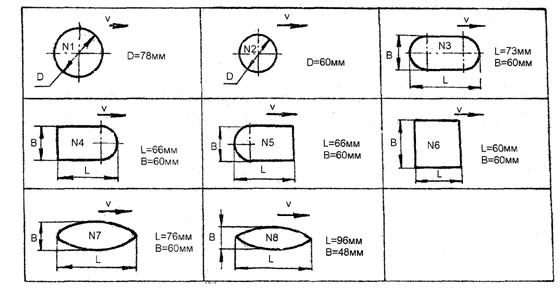
Рис.2.49. Геометрическая форма и размеры моделей третьей серии экспериментов
Буксировки моделей различной формы осуществлялись с резонансной скоростью (Рис.2.50). Для получения сравнительных данных масса всех моделей была одинаковой. Ее величина определялась чувствительностью датчика, так как в условиях линейной задачи амплитуда колебаний меняется прямо пропорционально интенсивности нагрузки. Площадь основания моделей оставалась неизменной. Результаты экспериментов в безразмерном виде представлены на Рис.2.51 - 2.52. Полученные зависимости указали на необходимость исследования влияния формы движущегося по льду судна на напряженно-деформированное состояние ледяного покрова при проектировании судов, предназначенных для разрушения льда резонансным способом [72].
Рис 2.50. Фрагмент буксировочных испытаний модели СВП
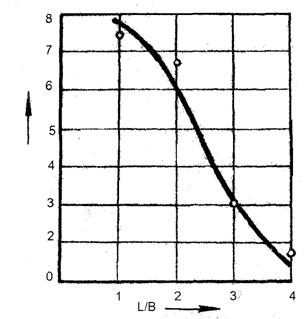
Рис.2.51. Влияние удлинения моделей на величину амплитуды ИГВ (первая серия)
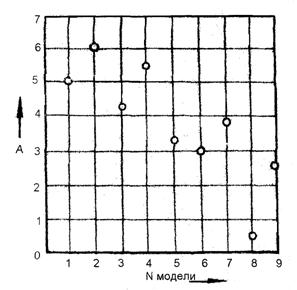
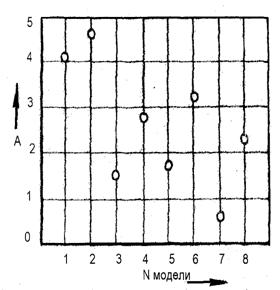
Рис.2.52. Влияние формы моделей на амплитуду ИГВ: вторая (слева) и третья серии
Для количественной оценки параметров резонансных ИГВ, возбуждаемых движением нагрузки в малом опытовом бассейне КнАГТУ на упругой модели сплошного льда, выполнялись буксировочные испытания модели нагрузки (ролика) (рис.2.53). Изменение глубины воды осуществлялось с помощью подвесного дна. Габариты чаши бассейна КнАГТУ составляли: L×B×H=2,1×1,4×1,0 м (рис.2.54)
Также исследовались режимы нагружения ледяного покрова ИГВ от летательных аппаратов при их эксплуатации с ледяных аэродромов. Для этого на поверхности воды свободно укладывался модельный ледяной покров (рис.2.55). В качестве модельного льда применялась резиновая пленка толщиной 1 мм. (масштаб моделирования составлял М 1:1000).
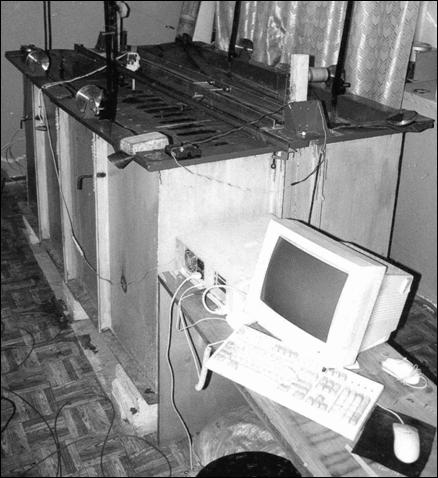
Рис.2.53.Общий вид экспериментального стенда

Рис.2.54.Чаша малого опытового бассейна КнАГТУ
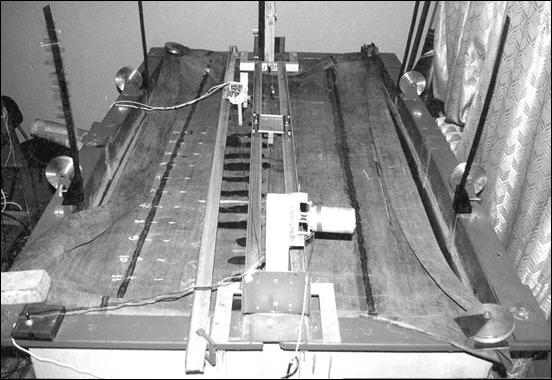
Рис.2.55.Общий вид модели ледяного покрова и буксировочной системы бассейна

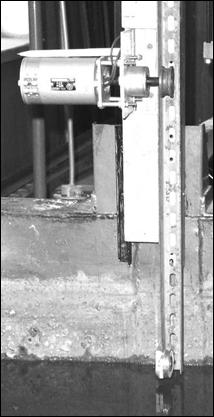
Рис.2.56.Стойка буксировочной системы с электроприводом
Рис.2.57.Схема лабораторной установки: 1 - бассейн; 2 - модельный лед; 3 - ролик; 4 - буксировочная система; 5 - подвесное дно
Имитация движущейся нагрузки осуществлялась с помощью ролика, приводимого в движение с помощью буксировочной системы малого опытового бассейна (рис.2.56 - 2.58). Вес ролика, имитирующего нагрузку, составлял 0,25 - 0,60 Н.
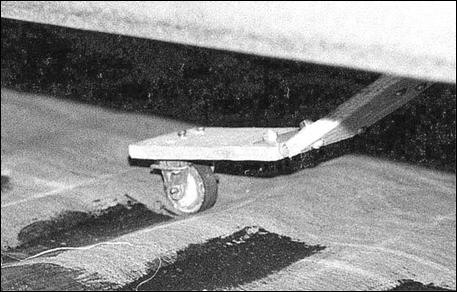
Рис.2.58.Общий вид ролика (модели) нагрузки
Запись профилей волн производилась с помощью датчика перемещений, сконструированного на основе манипулятора от персонального компьютера типа "мышь" (рис.2.59). Это позволяло параметры ИГВ, регистрируемые в процессе буксировочных испытаний модели, передавать непосредственно на компьютер. Наличие в конструкции манипулятора двух колесиков обеспечило возможность использования двух каналов для фиксации перемещений модельного льда и скорости троса буксировочной системы.В качестве аппаратуры для регистрации показаний датчика использовалась ПЭВМ типа IBM PC. Для обработки показаний датчика создан программный интерфейс "Mouse", который позволял в удобной форме отображать на экране и сохранять на жестком диске ЭВМ в виде числового массива данные координат профиля деформации модельного льда и параметры движения нагрузки.
С помощью модельных экспериментов исследовались следующие вопросы:
- влияние глубины на параметры ИГВ;
- влияние ширины водоема на параметры ИГВ;
- влияние сужения берегов на параметры ИГВ;
- влияние сужения берегов с учетом удара нагрузки на параметры ИГВ;
- влияние на параметры ИГВ режима "выход на берег".
С целью изучения характера возникающих в модельном льду ИГВ проводилась буксировка ролика с различными скоростями по поверхности модельного льда с одновременной регистрацией результатов датчиком перемещений. Типовые кривые профилей ИГВ в безразмерном виде приведены на рис. 2.60.
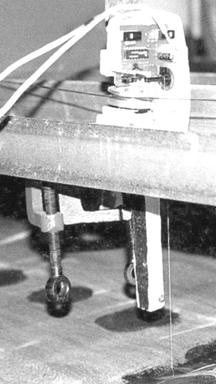
Рис.2.59.Общий вид датчика перемещений

Рис.2.60. Экспериментальные кривые профилей ИГВ.
Как показали буксировки модели (ролика), возникновение ИГР характеризуется максимумом амплитуды ИГВ, а скорость, при которой во льду распространяются волны наибольшей амплитуды, равнялась резонансной.Исследования влияния глубины воды на параметры ИГВ проводились с целью получение характеристик критических ИГВ, возникающих при различных глубинах водоема. В ходе эксперимента проводились буксировки ролика весом 0,25 Н с постоянной скоростью по поверхности модельного льда. Глубина воды в опытовом бассейне изменялась перемещением подвесного дна. Для каждого значения глубины было проведено несколько регистраций профиля ИГВ [126].
Исследование влияния ширины водоема на параметры ИГВ проводилось при глубине воды H = 0,1 м и резонансной скорости движения Vр » 1 м/с. В ходе эксперимента менялась ширина канала за счет увеличения расстояния между вертикальными пластинами с шагом: B = 0,2., 0,3., 0,4., 0,5., 0,6., 0,7 м. Направление движения ролика было симметричным относительно бортов бассейна. Датчиком записывалась скорость движения ролика и профиль возникающей волны в непосредственной близости от линии движения ролика. Обработка массивов экспериментальных данных проводилась в среде MathCAD [117].
Для моделирования влияния близости берегов на параметры ИГВ использовались две пластины высотой 100 мм, которые устанавливались между подвесным дном и модельным льдом (рис. 2.61) [126].
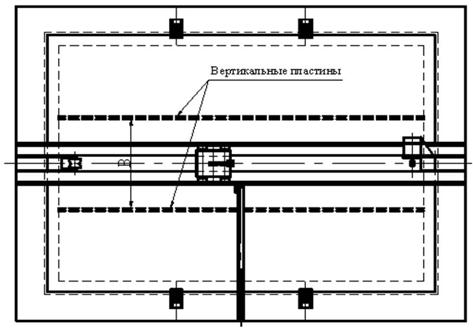
Рис.2.61.Схема экспериментальной установки для исследования влияния ширины водоема на параметры ИГВ
С целью изучения профиля ИГВ, возникающих при движении нагрузки в узких каналах, реках и заливах, производилась буксировка ролика весом 0,6 Н по поверхности модельного льда между вертикальными пластинами со скоростью, близкой к резонансной. Глубина воды обеспечивалась высотой пластин, а так же подвесным дном и составляла H = 0,1 м. Резонансная скорость движения груза, соответствовавшая максимальным амплитудам ИГВ была Vр » 1 м/с. В ходе эксперимента изменялась ширина канала за счет увеличения расстояния между вертикальными пластинами B. Это расстояние составляло: B = 0,2., 0,3., 0,4., 0,5., 0,6., 0,7 м.
Полученные экспериментальные данные могут использоваться для анализа качественного влияния близости берегов на несущую способность ледяного покрова. Так, наибольшие значения амплитуд ИГВ возникали при скоростях, соответствующих значению резонансной скорости, а также при наименьших малых глубинах воды, характерных для большинства рек и озер.
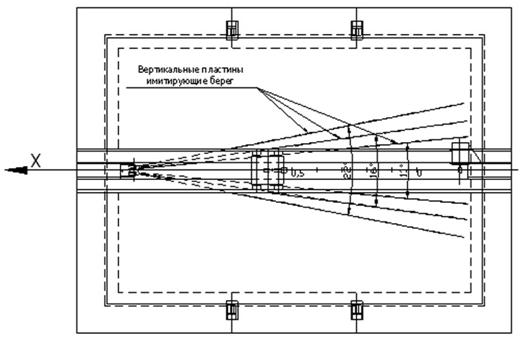
Рис.2.62.Схема экспериментальной установки для исследования влияния сужения берегов на параметры ИГВ
В реальных условиях эксплуатации самолета, при его посадке в заливах, проливах, а также в узких местах акватории рек, когда имеет место сужение берегов, актуальной остается проблема влияния их сужения на параметры возникающих ИГВ. С целью исследования данной проблемы в малом бассейне была проведена серия экспериментов, в процессе которых были получены кривые профиля ИГВ, возникающих при движении ролика по неразрушаемому сплошному льду [126]. На рис.2.62 приведена схема экспериментальной установки для исследования влияния сужения берегов на параметры ИГВ. На схеме представлены вертикальные пластины, угол между которыми изменялся и составлял 11, 16 и 22 градуса. Движение нагрузки осуществлялось из широкой части акватории в узкую.
Влияние сужения берегов с учетом удара нагрузки на параметры ИГВ исследовалось в ходе экспериментов, проводившихся на лабораторной установке, аналогичной представленной на рис.2.62. Отличие состояло в том, что движение модели нагрузки по модельному льду начиналось с ее падения на лед. Падение происходило со специально оборудованного для этого трамплина (см. рис.2.63).
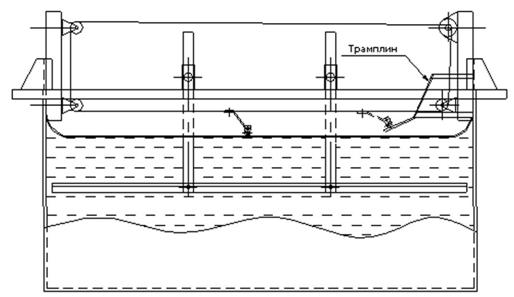
Рис.2.63.Схема экспериментальной установки для исследования влияния сужения берегов с учетом удара
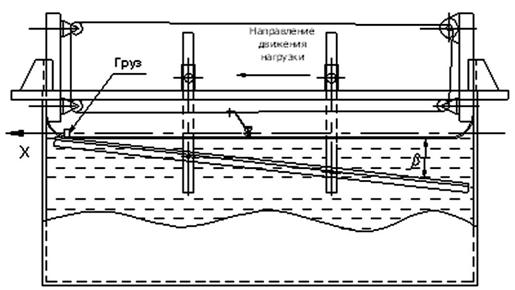
Рис.2.64.Схема лабораторной установки для исследования влияния выхода нагрузки на берег на параметры ИГВ
Исследование параметров ИГВ при выходе нагрузки на берег водоема выполнялось на лабораторной установке, схема которой представлена на рис.2.64. Изменение глубины воды осуществлялась с помощью установки подвесного дна под углом β к наружной поверхности модельного льда. Величины угла β были следующие 3., 4,5., 9., 12 и 15 градусов. Кроме того, модельный лед свободно укладывался на поверхности воды и защемлялся одним концом в зоне выхода подвесного дна (свободный конец защемлялся грузом, см. рис. 2.42). Движение нагрузки осуществлялось со скоростью ![]() , а направление движения осуществлялось с большей глубины акватории на мелководье, т.е. исследовались интерференция и трансформация возбуждаемых и отраженных ИГВ [127].
, а направление движения осуществлялось с большей глубины акватории на мелководье, т.е. исследовались интерференция и трансформация возбуждаемых и отраженных ИГВ [127].
Дополнительно были выполнены экспериментальные исследования влияния неоднородностей в ледяном покрове на распространение ИГВ. Для этого в резиновой пленке вырезались участки, имитировавшие майны (участки чистой воды в ледяном покрове) на различном удалении от линии движения нагрузки. Данные опыты проводились для оценки напряженно - деформированного состояния ледяного покрова при наличии его локальных неоднородностей в виде участков чистой воды.
По результатам опытов можно сделать вывод, что качественно параметры колебаний ледяного покрова при ИГР моделировались удовлетворительно. Это позволило в лабораторных условиях предварительно исследовать вопросы, теоретическое изучение которых было затруднено. Результаты
выполненных экспериментов могут быть полезны при анализе теоретических решений в рамках разработанных математических моделей и приведены в работах [125-127].
Для количественной оценки параметров ИГВ при ИГР необходимо учитывать и моделировать вязкостные свойства льда, что рассмотрено ниже.