
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
2.5. Имитация взрывных работ в ледяном покрове
Исследования воздействия на сплошной ледяной покров взрывных импульсных нагрузок проводились в малом опытовом бассейне КнАГТУ. Для имитации сплошного льда в опытах использовалась полиэтиленовая пленка (рис.2.127). Заряды взрывчатого вещества (детские пистоны) закладывались под модельный лед - полиэтиленовую пленку - и подрывались дистанционно с помощью электрозапалов. Запись колебаний искусственного льда производилась электромеханическим датчиком перемещений и двухкоординатным самописцем.
Рис.2.127.Моделирование взрывов под модельным льдом

Рис.2.128.Колебания пленки от подводных взрывов
В процессе экспериментов производились как одиночные , так и серийные взрывы с изменяемым интервалом между ними с целью изучения резонансного усиления колебаний модельного льда (пленки) за счет интерференции возбуждаемых ИГВ (рис.2.128). Выполненные предваритель-ные эксперименты подтвердили целесообразность дальнейшего проведения исследований в этом направлении.
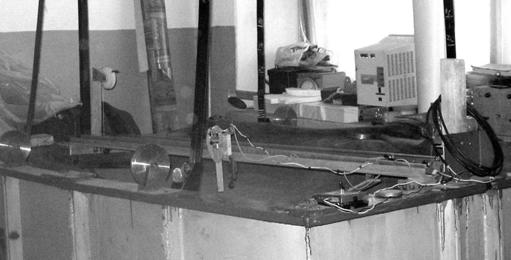
Рис.2.129.Общий вид малого бассейна
Для усовершенствования технологии взрывных работ при разрушении ледяных заторов в малом бассейне КнАГТУ (рис.2.129) были выполнены соответствующие экспериментальные исследования. В опытах в качестве модельного льда использовалось резиновое покрытие толщиной 1 мм. Для имитации ударных нагрузок на модельный лед была спроектирована (рис.2.130) и изготовлена экспериментальная установка (рис.2.131) в составе группы ударников и блока управления. Блок управления ударниками (БУУ) предназначен для осуществления режимов срабатывания ударников (поступательное последовательное, поступательное встречное и одновременное). Общий вид БУУ показан на рис.2.133, а электрическая схема БУУ на рис. 2.132.
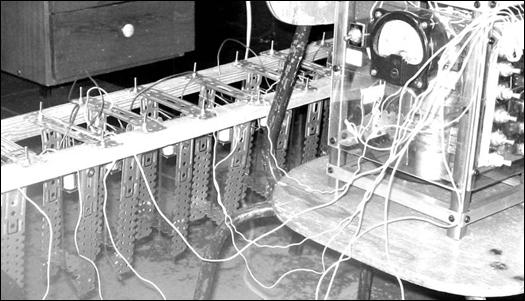
Рис.2.130.Общий вид экспериментальной установки
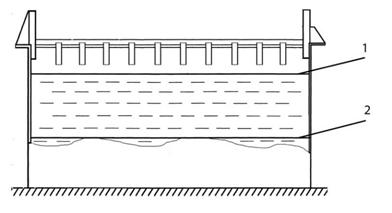
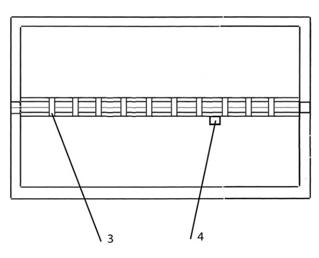
Рис.2.131.Схема экспериментальной установки: 1 - модельный лед; 2 - подвесное дно; 3 - ударник; 4 - датчик перемещений
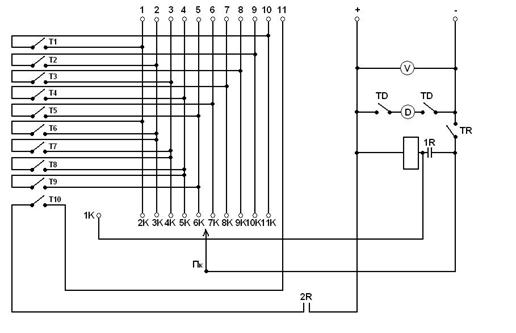
Рис.2.132. Электрическая схема БУУ

Рис.2.133. Блок управления ударниками

Рис.2.134.Ударник
Ударник (рис.2.134) был предназначен для создания импульсной нагрузки на модельный лед. Он состоял из рамы с направляющей планкой, соленоида, штанги ударника и упругого элемента (резинки для возврата штанги в исходное положение).
Профили ИГВ в модельном льду регистрировались с помощью датчика перемещений (рис.2.135), подключенного к персональному компьютеру. Характеристики ИГВ записывались с помощью специальной программы (рис.2.136) в виде массивов чисел. В ходе экспериментов датчиком перемещений записывался профиль возбуждаемых волн, который представлялся в компьютере в виде числового массива. По каждому массиву определялось максимальное значение амплитуды. После обработки массивов определялись зависимости амплитуды от скорости и последовательности срабатывания ударников.

Рис.2.135.Датчик перемещений
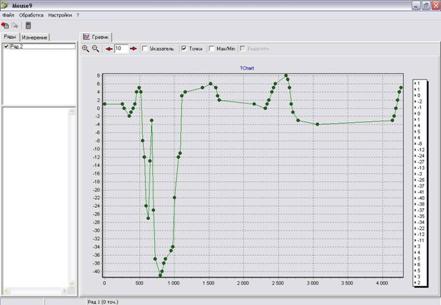
Рис.2.136.Типовая запись показаний датчика
Серии экспериментов проводились на глубинах Н=0,01м и H=0,02м. Исследовались три режима срабатывания ударников: поступательно-последовательное (от первого к последнему), рис. 2, одновременное и поступательно-встречное (попарно от краев к центру), рис. 3, с интервалом времени  , где 15см - расстояние между ударниками; k - коэффициент приближения к критической скорости ИГВ; на мелководье [423], то есть
, где 15см - расстояние между ударниками; k - коэффициент приближения к критической скорости ИГВ; на мелководье [423], то есть ![]() (при проведении экспериментов он был равен 0,8; 0,9; 1; 1,1; 1,2). Диапазон изменений составлял: (0,8; 0,9; 1; 1,1; 1,2) , где g - ускорение силы тяжести.
(при проведении экспериментов он был равен 0,8; 0,9; 1; 1,1; 1,2). Диапазон изменений составлял: (0,8; 0,9; 1; 1,1; 1,2) , где g - ускорение силы тяжести.
В ходе экспериментов датчик перемещения отслеживал профиль возникающей волны непосредственно близко к оси, на которой располагались ударники, и передавал эти данные на ПК в виде массива чисел. Из каждого массива определялось максимальное значение амплитуды ИГВ. После обработки массивов были построены зависимости амплитуд волн от интервала времени срабатывания ударников.
Разметка модельного слоя при поступательно-последовательном и одновременном срабатывании ударников проводилась в следующем порядке: первый ударник устанавливался на расстоянии 40 см от края модельного слоя для того, чтобы избежать наложения амплитуды созданной волны с амплитудой отраженной волны от борта бассейна. Последующие ударники расставлялись через 15 см. Для снятия характеристик ИГВ датчик устанавливали равномерно по длине бассейна в четырех точках (1/5L, 2/5L, 3/5L, 4/5L где L - длина бассейна).
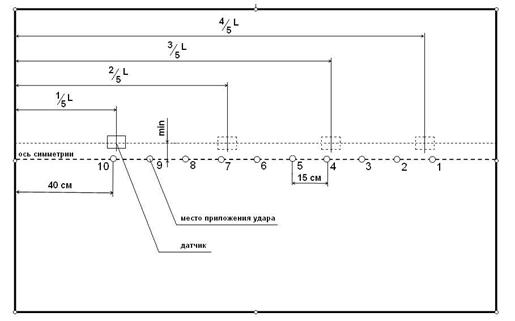
Рис.2. 137. Схема проведения эксперимента при поступательно-последовательном и одновременном срабатывании ударников.
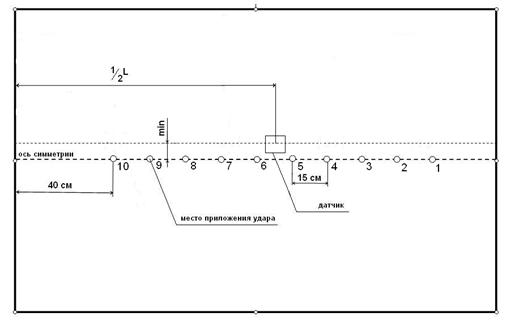
Рис.2.138. Схема проведения эксперимента при поступательно-встречном срабатывании ударников.
При поступательно-встречном срабатывании ударников разметка проводилась аналогично. Особенность этого режима заключается в том, что датчик перемещения располагается по середине модельного слоя (1/2L), а очередность срабатывания ударников была следующей: в начале срабатывали ударники 1 и 10, затем с последующим интервалом времени - 2 и 9, 3 и 8, 4 и 7, 5 и 6.
Схема расстановки ударников и датчика при поступательно-последовательном и одновременном срабатывании ударников приведена на рис.2.137, а на рис.2.138 при поступательно-встречном срабатывании ударников.
После снятия и обработки данных строились графики распределения амплитуд при трёх режимах срабатывания ударников, то есть при различных схемах приложения импульсной нагрузки.
Результаты экспериментов представлены на рис.2.139- 2.142
На основе выполненных экспериментов можно сделать следующие выводы:
1. Как и следовало ожидать, наиболее эффективным режимом для возбуждения ИГВ максимальной амплитуды является поступательное-встречное нагружение модельного слоя импульсными нагрузками.
2. Поступательно-последовательное воздействие импульсов на модельный слой не имеет особых преимуществ по сравнению с одновременным их воздействием, но позволяет в определенных ледовых условиях его оптимизировать.
3. Значительное увеличение максимальных амплитуд ИГВ вблизи стенок бассейна при одновременном воздействии импульсов можно объяснить интерференцией основных и отраженных ИГВ, что можно использовать при решении задач отрыва кромок затора от береговой линии.
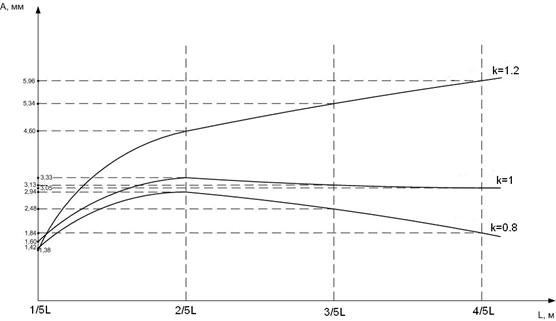
Рис.2.139. График зависимости амплитуды ИГВ от места расположения датчика и коэффициента k при поступательно-последовательном срабатывании ударников и глубине Н=0,01.
Рис.2.140. График зависимости амплитуды ИГВ от места расположения датчика и коэффициента k при поступательно-последовательном срабатывании ударников и глубине Н=0,02.
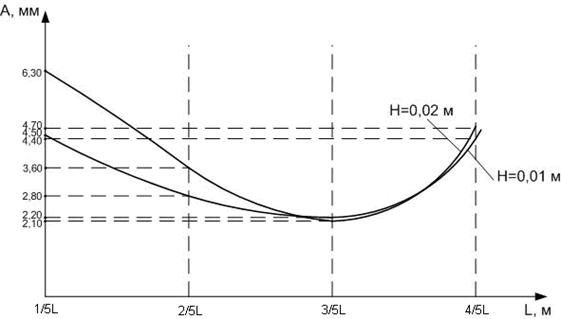
Рис.2.141. График зависимости амплитуды ИГВ от места расположения датчика при одновременном срабатывании ударников на глубинах H=0,01 и Н=0,02.
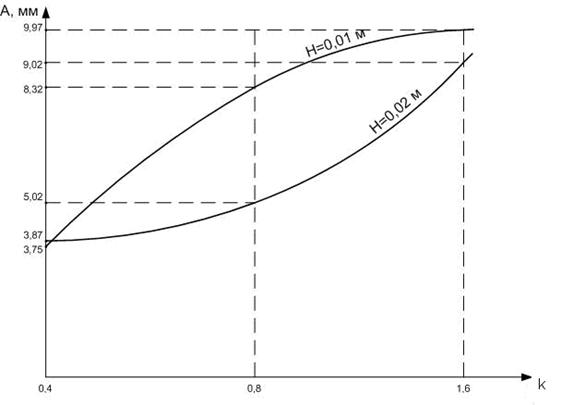
Рис.2.142. График зависимости амплитуды ИГВ от коэффициента k при поступательно-встречном срабатывании ударников на глубинах Н=0,01 и Н=0,02 м.