
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
3.1. Опыты с моделями объектов в ледовом бассейне
Ледовый бассейн, в котором исследовались вопросы ледопроходимости судов, представлял собой стальной бак размерами L´B=15600´1600´850 мм [1]. Поскольку бассейн был установлен на открытом воздухе, то лед в нем намораживался за счет естественных низких температур. Бассейн оборудован сливной и наливной системами, имел компенсационный бак для устранения напряженного состояния ледяного поля, вызываемого вытеснением воды при намораживании льда и размещении в нем модели. Компенсационный бак и приводы управления системами располагались в теплом помещении. Для предотвращения быстрого обмерзания стенки бассейна с наружной стороны засыпались снегом. Для проведения испытаний бассейн оснащен гравитационной и динамометрической буксировочными системами.
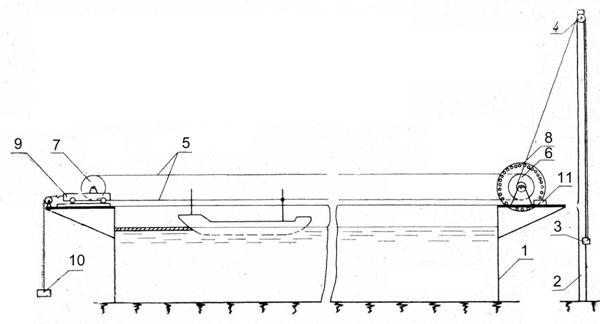
Рис.3.1. Гравитационная буксировочная система: 1 - бассейн; 2 - мачта; 3 - буксировочный груз; 4 - направляющий блок; 5 - бесконечный трос; 6 - ведущий шкив; 7 - вдомый шкив; 8 - диск с отверстиями; 9 - тележка устройства натяжения; 10 - груз натяжения; 11 - датчик скорости
Гравитационная система (рис.3.1) состояла из натяжного и буксировочного устройств. Движение модели осуществлялось с помощью бесконечного буксирного троса. Использование этой системы при испытаниях моделей с малой скоростью приводило к большому разбросу экспериментальных точек, связанному с неустойчивым движением моделей во льду предельной толщины. Для устранения такого недостатка применялось динамометрическая буксировочная система (рис.3.2).
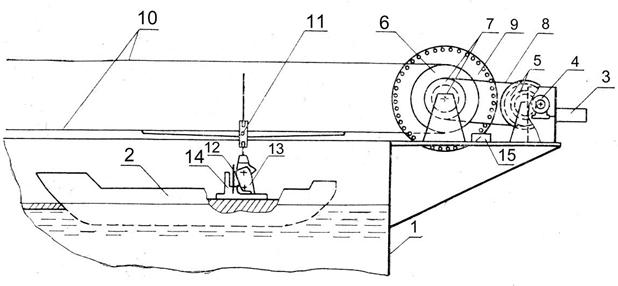
Рис.3.2. Динамометрическая буксировочная система: 1- бассейн; 2 - модель; 3 - электродвигатель; 4 - редуктор; 5 и 7 - шкивы; 6 - ведущий шкив; 8 ремень; 9 - диск; 10 - бесконечный трос; 11 - устройство закрепления модели; 12 - консольная балочка; 13 - кулачок; 14 - фундамент; 15 - датчик скорости
При ее использовании задавалась постоянная скорость движения модели, а буксировочное сопротивление измерялось. Вращение ведущего шкива буксировочной системы осуществлялось с помощью ременной передачи от редуктора электромотора. Регулировка скорости движения модели производилось ступенчато (с помощью ременной передачи) и плавно (изменением напряжения питания). Скорость движения модели определялось фотоимпульсным способом. Свет на фотодиод попадал через отверстия в диске ведущего шкива буксировочной системы. Сигнал с фотодиода регистрировался частотомером или записывался шлейфовым осциллографом через преобразователь. Для измерения буксировочного сопротивления использовался специальный тензометрический динамометр. Сигнал с тензодинамометра записывался на осциллограф.
Перед испытаниями в бассейне намораживался лед определенной толщины. Прочность его на изгиб измерялся во время испытаний разрушением клавиш, выпиливаемых в ледяном покрове.
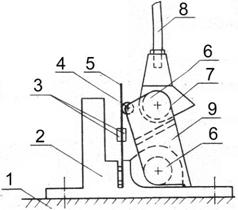
Рис.3.3. Тензометрический динамометр: 1 - корпус модели; 2 - фундамент; 3 - тензорезисторы; 4 - ролик; 5 - консольная балочка; 6 - подшипник; 7 - ограничитель перемещений; 8 - штанга; 9 - кулачок