
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
3.2.5. Эксперименты с моделью летательного аппарата в ледовой ванне
Целью проведения модельных экспериментов в отличие п.3.2.4. было изучение напряженно-деформированного состояния естественного ледяного покрова, находящегося под действием нагрузки от ЛА, в условиях ограниченного по площади и глубине водоема, т.е. озера. Серия опытов была проведена в марте-апреле 1999 г. в районе судоходного канала Амурского судостроительного завода. В процессе подготовки ледового полигона во льду естественного водоема вырубалась ванна размерами 6 ´ 3 ´ 1 м (рис.3.56), которая заполнялась водой для намораживания модельного льда толщиной 4 - 6 мм.

Рис.3.55.Подготовка ледового полигона
Буксировочная система ванны (рис.3.56) состояла из двух вертикальных стоек, на балках которых закреплялись блоки, через которые пропускался бесконечный буксирный трос (рис.3.57). В качестве привода использовался электродвигатель частота вращения вала которого изменялась с помощью ременного вариатора (рис.3.58).

Рис.3.56.Общий вид буксировочной системы
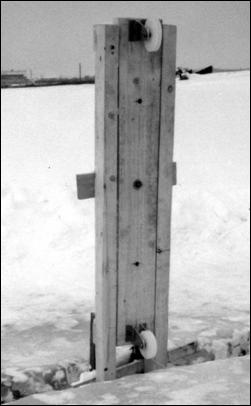

Рис.3.57.Стойки буксировочной системы
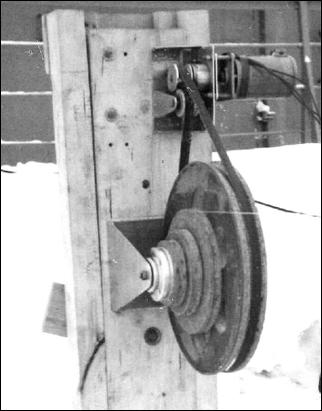
Рис.3.58.Электропривод буксировочной системы
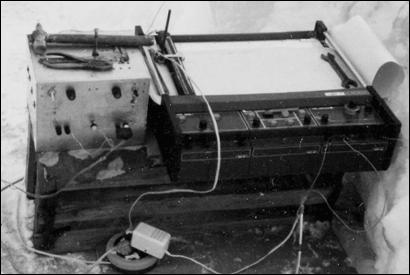
Рис.3.59.Самописец и прибор регулировки скорости движения модели

Рис.3.60.Процесс записи деформаций модельного льда
Запись деформаций модельного льда осуществлялась с помощью самописца (рис.3.59) и электромеханического датчика перемещений (рис.3.60), применявшегося при проведении буксировочных испытаний моделей ледоколов в опытовом бассейне КнАГТУ. Модель летательного аппарата представляла собой тележку, масса которой варьировался от 0,7 кг до 2,3 кг. Нагружение тележки производилось с помощью сменных грузов (рис.3.61).
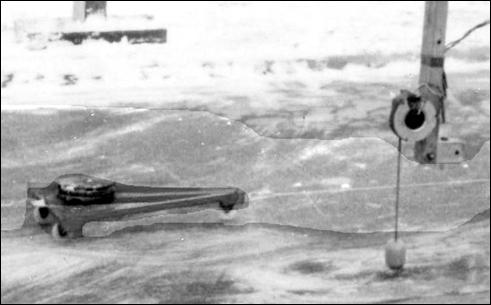
Рис.3.61. Модель ЛА и электромеханический датчик перемещений
В ходе модельных экспериментов имитировалось движение самолета типа Ан-24 с постоянной скоростью (рулежка) по замерзшему водоему, а также вдоль свободной кромки берегового припая. Опытным путем было определено значение резонансной скорости для данной глубины водоема - 9,5 м/с (по результатам пересчета на натуру), получены профили ИГВ для различных значений скорости движения модели ЛА, а также при различных ее положениях относительно электромеханического датчика перемещений. Были получены зависимости параметров ИГВ от скорости движения нагрузки (рис.3.62), ее веса, а также исследовано влияние близости заделки.

Рис.3.62. Буксировка модели ЛА в модельном льду
Кроме того, была получена картина изменения напряженно-деформированного состояния ледяного покрова по мере удаления от линии движения модели ЛА [154].
В ходе заключительного этапа модельных экспериментов проводилось исследование характера и величины прогиба возникающего вследствие статического нагружения ледяного покрова моделью ЛА. Измерения осуществлялись визуально с помощью механического датчика во время движения тележки со скоростью м/с. Полученная информация может использоваться для разработки безопасных режимов эксплуатации ледовых аэродромов [154].