
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
Автоматизированное проектирование технических систем: Учебное пособие.
Бельков В. Н., Ланшаков В. Л.,
3.2.1. Двухопорная цапфа
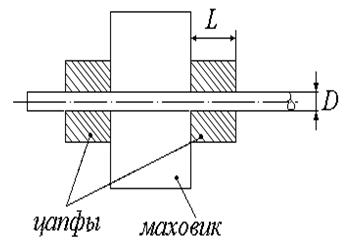
Маховик веса W, установленный на оси диаметра D. поддерживается двухопорной цапфой, изображенной на рис. 3.5. Требуется определить L и D таким образом, чтобы минимизировать момент трения вращающейся оси при допустимом зазоре на смазку.
|
Рис. 3.5. Конструктивная схема.
|
Момент трения для двух опор вычисляется по формуле:
где k1 - константа, зависящая от вязкости применяемого масла; w - угловая скорость вращения;
|
 ,
,
e - эксцентриситет конструкции, определяемый как ![]() ,
,
где 0 < e < ![]() , а
, а ![]() - верхний предел эксцентриситета конструкции;
- верхний предел эксцентриситета конструкции;
h0 - наименьшая толщина масляного покрытия при установившемся режиме работы механизма.
Ограничения на h0 налагаются следующими неравенствами :
![]() ,
,
где ![]() - минимальная толщина масляного покрытия.
- минимальная толщина масляного покрытия.
Угол кручения оси q должен быть не больше заданного qмах, а его величина определяется по формуле:
![]() ,
,
где k2 - константа, зависящая от точки приложения вращающего момента на оси.
Вес маховика W и нагрузки на опоры С должны быть связаны неравенством:
2С ≥ W.
Из гидродинамических соображений безопасная нагрузка на опоры определяется соотношением:
![]() ,
,
где ![]() .
.
Таким образом, при заданных величинах ![]() qмах найти такие параметры D, L, h0, чтобы минимизировать момент трения. Неизвестные обозначим следующим образом: x1 = D, x2 = L, x3 = h0. Поэтому модель оптимизации имеет вид:
qмах найти такие параметры D, L, h0, чтобы минимизировать момент трения. Неизвестные обозначим следующим образом: x1 = D, x2 = L, x3 = h0. Поэтому модель оптимизации имеет вид:
целевая функция -  ,
,
ограничения: 1) (1 - ē) δx3-1<1,
2) 1/(Qmaxk2)x1-1<1,
3) 2/ δ x4-1 x3 - 2/ δ2 x4-1 x32<1,
4) 2 k1ωπW/ δ2 x1-1 x2-3 - 2 k1ωπW / δ3 x1-1 x2-3 x3-1<1.
Определим степень трудности данной оптимизационной задачи:
d = n - m - 1,
где n = 7 - количество позиномов, входящих, как в целевую функцию, так и в ограничения; m = 4 - количество неизвестных; поэтому:
d = 7 -4 - 1 = 2.
Составим систему уравнений, первое из которых является условием нормализации, а остальные - ортогональности:
δ1 = 1
3δ1 - δ3 - δ6 - δ7 = 0
δ1 -3 δ6 -3 δ7 = 0
-δ2 + δ4 + 2 δ5 - δ7 = 0
-0,5 δ1 - δ4 - δ5 = 0
Введем базисные переменные r1 = δ5, r2 = δ2; тогда:
δ1 = 1
δ2 = r2
δ3 = 8/3
δ4 = -1-r1 - r2
δ5 = 0,5 + r1 + r2
δ6 = 1/3 - r1
δ7 = r1
Решая систему нелинейных уравнений равновесия
(-1 - r1 - r2)-1 r1(-1/5 - 2r1 -2 r2)2 (1/3 - 2 r1)2 (0,5 + r1 + r2) (1/3 - r1)-1 = 1/2δ2 и
(-1 - r1 - r2)-1 (-1/5 - 2r1 -2 r2)2 (0,5 + r1 + r2) = (1- ē )/2,
найдем r1, r2. Подставляя найденные значения базисных переменных, можно определить значения двойственных переменных, по которым определяется значение двойственной функции V(δ).
Анализ представленной ММ показывает, что данная задача относится к обобщенному математическому программированию, поэтому значение двойственной функции не является оценкой значения ЦФ. В связи с этим, решение прямой задачи заключается в поиске стационарных точек двойственной задачи.
Следует отметить, что для решения обобщенных задач геометрического программирования разработано два типа методов: последовательные методы, использующие ряд аппроксимационных задач с помощью метода конденсации, и методы непосредственного решения в одном из эквивалентных видов, к которым относятся, например, экспоненциальный и дробно - геометрический с ограничениями в виде неравенств разных знаков.