
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания

ПОВЫШЕНИЕ ЭФФЕКТИВНОСТИ ОБСЛЕДОВАНИЯ АВТОМОБИЛЬНЫХ ДОРОГ В РАЙОНАХ ЛЕСОЗАГОТОВОК
Лобанов Ю. В., Кондрашова Е. В., Курьянов В. К.,
1.4 Математическое обеспечение процесса регистрации данных о геометрии дороги
Рассмотрим, как в разработанной системе работают алгоритмы и программы регистрации данных о геометрии обследуемого участка дороги:
Алгоритм регистрации данных:
1. Ввод числа измерений N число измерений, задаваемое, исходя из протяжённости обследуемого участка дороги).
2. Ввод числа оборотов n, регистрируемых специальным датчиком оборотов.
3. При условии n=5 ввод результатов измерений, иначе переход к п. 2.
4. Увеличение счётчика итераций i
5. При условии равенства счётчика итераций и числа измерений N, переход к п. 7, иначе к п. 6.
6. Обнуление числа оборотов.
7. Запись результатов в память ЭВМ.
Данные считываются через 5-ть оборотов колеса дорожной лаборатории: ![]() - измерения по датчику скорости, трём координатам полугирокомпаса и гироскопа соответственно.
- измерения по датчику скорости, трём координатам полугирокомпаса и гироскопа соответственно.
Первичная обработка данных по геометрии дороги предполагает определение траектории движения дорожной лаборатории, скоростного режима измерения регистрируемых параметров. Рассмотрим программу, которая выполняет эту обработку. Проблема заключается в определении траектории движения дорожной лаборатории, то есть определения курсового движения по измеренному полугирокомпасом (ПГК) азимуту и уклонов по результатам измерения показаний гироскопа (ГК).
Для вычисления пути, то есть привязки группы замеренных данных с номером i используем следующую формулу: ![]() (1.1), где
(1.1), где ![]() - расстояние до начала обследуемого участка дороги, м;
- расстояние до начала обследуемого участка дороги, м; ![]() - расстояние, через которое выполнялись измерения.
- расстояние, через которое выполнялись измерения.
Для расчёта скорости![]() (1.2), где d - диаметр колеса; n- число оборотов колеса, через которое выполнялись замеры (=5); t- число импульсов, генерируемое датчиком скорости в секунду; V - показания датчика скорости, км/ч.
(1.2), где d - диаметр колеса; n- число оборотов колеса, через которое выполнялись замеры (=5); t- число импульсов, генерируемое датчиком скорости в секунду; V - показания датчика скорости, км/ч.
По условиям работы передвижной лаборатории на базе автомобиля ГАЗЕЛЬ можно принять![]() (1.3)
(1.3)
Если дорожная лаборатория движется по прямой, то принимаем:![]() , R=0
, R=0
Таблица 1.4 - Восстановление плана трассы (данные, полученные при обследовании трассы)
|
Проезд |
Параметр |
Обозначение |
Первый поворот |
Второй поворот |
Третий поворот |
Точность |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Спуск 1 |
Угол (°) |
|
80 |
37 |
54 |
2,5 % |
|
|
-2 |
-1 |
-2 |
|||
|
% |
2,5 |
2,7 |
3,7 |
|||
|
Кривая, м |
|
174 |
324 |
374 |
21 % |
|
|
|
0 |
98 |
128 |
Окончание таблицы 1.4
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
|
% |
0 |
30 |
34 |
|
|
Радиус, м |
|
125 |
497 |
393 |
19 % |
|
|
|
3 |
165 |
90 |
|||
|
% |
2,4 |
33 |
23 |
|
||
|
Спуск 2 |
Угол (°) |
|
79 |
37 |
56 |
2,5 % |
|
|
-3 |
-2 |
0 |
|||
|
% |
3,8 |
5,4 |
0 |
|||
|
Кривая, м |
|
180 |
240 |
300 |
3,4 % |
|
|
|
6 |
14 |
4 |
|||
|
% |
3,3 |
5,6 |
1,3 |
|||
|
Радиус, м |
|
130 |
373 |
308 |
5,9 % |
|
|
|
8 |
41 |
5 |
|||
|
% |
6,1 |
11 |
1,6 |
|||
|
Подъём |
Угол (°) |
|
80 |
38 |
51 |
2,6 % |
|
|
-2 |
-1 |
-5 |
|||
|
% |
2,5 |
2,6 |
9,8 |
|||
|
Подъём |
Кривая, м |
|
224 |
249 |
299 |
10 % |
|
|
50 |
23 |
3 |
|
||
|
% |
22,3 |
9,2 |
1 |
|||
|
Радиус, м |
|
160 |
376 |
336 |
15 % |
|
|
|
38 |
42 |
33 |
|||
|
% |
24 |
11,1 |
9,8 |
|||
|
Съём данных |
Угол (°) |
|
82 |
38 |
58 |
1,5 % |
|
|
0 |
-1 |
2 |
Окончание таблицы 1.4
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
Съём данных |
Угол (°) |
% |
0 |
2,6 |
3,4 |
|
|
Кривая, м |
|
170 |
270 |
330 |
15 % |
|
|
|
-4 |
44 |
86 |
|||
|
% |
2,3 |
16,3 |
26 |
|
||
|
Радиус, м |
|
119 |
407 |
326 |
9,2 % |
|
|
|
-3 |
73 |
23 |
|||
|
% |
2,5 |
18 |
7 |
|||
|
Эталон |
Угол (°) |
|
82 |
39 |
56 |
1 % |
|
Кривая, м |
|
174 |
226 |
296 |
||
|
Радиус, м |
% |
122 |
332 |
303 |
||
|
Точность определения элементов (средняя) |
Угловые |
Линейные |
||||
|
2,5º |
12 % |
|||||
|
Точность определения элементов (наилучшая) |
0º |
3 % |
||||
Если движение происходит по кривой, то
 (1.4) где
(1.4) где![]() - измеренное значение азимута на начале исследуемого участка;
- измеренное значение азимута на начале исследуемого участка;
![]() - в конце (например, в начале 60º, в конце - 62º, тогда
- в конце (например, в начале 60º, в конце - 62º, тогда ![]()
Это справедливо для случая, когда ![]() соответствует 100 м.
соответствует 100 м.
Так как азимут измеряется в диапазоне 0÷360º при определении ![]() следует выполнить следующее преобразование:
следует выполнить следующее преобразование:
 (1.5)
(1.5)
Вследствие учёта конструкции ГК при измерении уклонов значение его в градусном измерении определяется следующим образом:
![]() (1.6), где P - показания ГК;
(1.6), где P - показания ГК;
![]() - значение показаний ГК для уклона в 0º, то есть для горизонтального участка продольного профиля.
- значение показаний ГК для уклона в 0º, то есть для горизонтального участка продольного профиля.
Пересчёт в промилле и проценты осуществляется по обычным соотношениям: ![]()
где ![]() перевод из угла градусной меры в радианы, так как языке Delphi тригонометрические функции вычисляются от аргументов, значения которых измеряется не в градусах, а в радианах.
перевод из угла градусной меры в радианы, так как языке Delphi тригонометрические функции вычисляются от аргументов, значения которых измеряется не в градусах, а в радианах.
При вычислении значений азимутов и уклонов для сглаживания результатов выполняется усреднение по ![]() , которое принимается равным от 5 до 70 в зависимости от состояния дороги.
, которое принимается равным от 5 до 70 в зависимости от состояния дороги.
Алгоритм первичной обработки данных следующий:
1. Ввод условий обработки.
2. Расчёт числа циклов C.
3. При условии окончания обследуемого участка переход к п.17, иначе к п.4.
4. Расчёт разности двух азимутов смежных участков оцениваемого участка A, радиуса R и числа измерений N в зависимости от длины обследуемого участка.
5. При условии R=0 переход к п. 6, иначе к п. 7.
6. Определение элементов плана трассы: номера участка дороги j, по которому усредняются регистрируемые значения; радиуса, направления движения дорожной лаборатории S, разности двух азимутов смежных участков оцениваемого участка A, переход к п. 10.
7. При условии ![]() переход к п. 8, иначе к п. 10.
переход к п. 8, иначе к п. 10.
8. При условии левого поворота, расчёт ![]() , переход к п. 10.
, переход к п. 10.
9. При условии правого поворота, расчёт ![]() , переход к п. 10.
, переход к п. 10.
10. Расчёт уклона P.
11. При условии отсутствия уклона, переход к п. 12, иначе к п. 13.
12. Расчёт горизонта, переход к п. 16.
13. При условии ![]() переход к п. 14, иначе к п. 15.
переход к п. 14, иначе к п. 15.
14. Расчёт уклона подъёма, переход к п. 16.
15. Расчёт ровности r и скорости V.
16. Определение шага итерации j, переход к п. 3.
17. Окончание работы.
Схема первичной обработки данных показана на рис. 1.4 и 1.5.
Результат работы рассматриваемой программы - таблица 1.5, в которой попикетно приведены усредненные значения по траектории движения лаборатории, ровности и скорости.
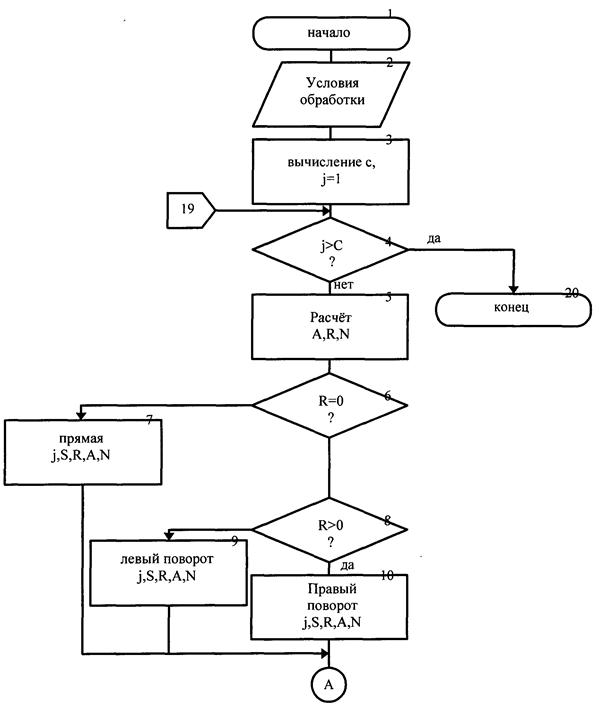
Рис. 1.4 Схема алгоритма первичной обработки данных (начало)
Начало отсчёта расстояния принимается равным 0. Расстояние, которое проходит лаборатория за время выполнения одного измерения - 10 м. По датчику уклона принимается за 0 отсчёт 452, а одному градусу соответствует значение показаний, равное 78 (в зависимости от типа используемого гироскопа эти показатели меняются и могут быть подобраны при тарировке системы).
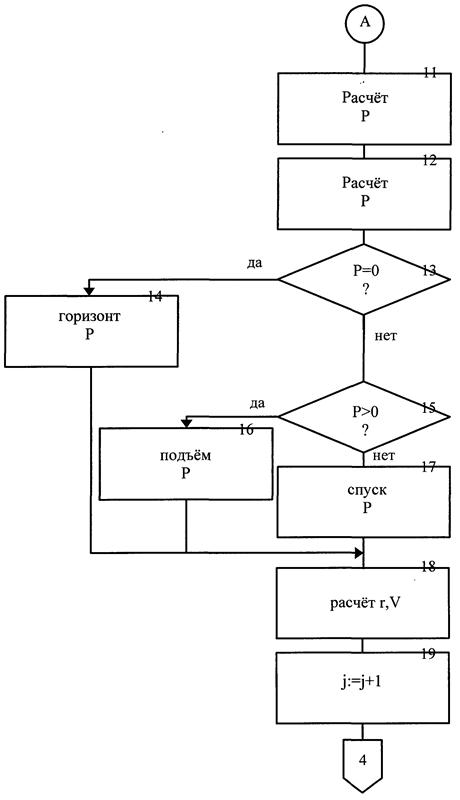
Рис. 1.5 Схема алгоритма первичной обработки данных (окончание)
Таблица 1.5 - Траектория движения дорожной лаборатории
|
№ |
Расст |
Рад |
Угол |
Азим |
ПО-т |
Уклон гр |
Укл % |
Пром |
Укл |
Ровн |
Скор |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
1. |
0 |
0 |
0 |
0 |
ПР |
0.0 |
0 |
0 |
Г |
70 |
36 |
|
2. |
100 |
0 |
-0 |
0 |
ПР |
0.0 |
0 |
0 |
Г |
94 |
33 |
|
3. |
200 |
-5849 |
-1 |
-1 |
ПП |
-1.0 |
-2 |
-18 |
С |
300 |
25 |
|
4. |
300 |
3159 |
2 |
1 |
ЛП |
-3.3 |
-6 |
-57 |
С |
28 |
42 |
|
5. |
400 |
-6869 |
-1 |
0 |
ПП |
-3.5 |
-6 |
-61 |
С |
33 |
40 |
|
6. |
500 |
-6826 |
-1 |
-1 |
ПП |
-3.5 |
-6 |
-61 |
С |
64 |
37 |
|
7. |
600 |
-204 |
-28 |
-29 |
ПП |
-3.4 |
-6 |
-59 |
С |
4 |
30 |
|
8. |
700 |
-115 |
-50 |
-79 |
ПП |
-2.8 |
-5 |
-50 |
С |
9 |
45 |
|
9. |
800 |
2137 |
3 |
-76 |
ЛП |
-2.9 |
-5 |
-51 |
С |
55 |
40 |
|
10. |
900 |
425 |
13 |
-63 |
ЛП |
-3.0 |
-5 |
-52 |
С |
50 |
44 |
|
11. |
1000 |
483 |
12 |
-51 |
ЛП |
-3.1 |
-5 |
-53 |
С |
36 |
40 |
|
12. |
1100 |
696 |
8 |
-42 |
ЛП |
-3.5 |
-6 |
-61 |
С |
45 |
42 |
|
13. |
1200 |
0 |
-0 |
-43 |
ПР |
-3.4 |
-6 |
-60 |
С |
17 |
38 |
|
14. |
1300 |
644 |
9 |
-34 |
ЛП |
-3.4 |
-6 |
-60 |
С |
12 |
38 |
Обозначения столбцов: № - номер пикета; Расст - расстояние от начала участка; Угол - значение в градусах разности азимутов по оцениваемому и предыдущему пикету; Азим - азимут (условный, относительно нулевого пикета); ПО-т - правый (ПП), левый (ЛП) повороты или прямая (ПР); Укл гр - уклон в градусах; Укл % - уклон в %; Пром - уклон в промилле; Укл - тип уклона (Г - горизонталь; С - спуск; П - подъём); Ровн - ровность дорожного покрытия пикета в см пересчитана по отношению в км, то есть если участок дороги на расстояние в 1 км будет иметь такое же покрытие как и оцениваемый пикет; Скор - скорость движения дорожной лаборатории при регистрации данных.
В общем случае план трассы, её продольный профиль представляют собой последовательность прямых и кривых. При оценке геометрических элементов дороги, их размеров для прямых вставок определяются одни параметры, а для кривых другие. Так, по плану трассы для прямой вставки необходимо измерить её протяжённость, а для кривой - радиус, угол, тангенс, биссектрису, домер. Поэтому одной из первых задач обработки данных, получаемых дорожной лабораторией, является задача определения участка дороги: находится он на прямой вставке или - кривой.
Для формирования математической модели задачи введем следующую систему обозначений:
![]() - измеренный азимут оцениваемого участка дороги;
- измеренный азимут оцениваемого участка дороги;
![]() - измеренный азимут предыдущего участка дороги;
- измеренный азимут предыдущего участка дороги;
![]() - признак, характеризующий оцениваемый участок следующим образом
- признак, характеризующий оцениваемый участок следующим образом
 (1.8)
(1.8)
где ![]() ,
, ![]() - точность измерения азимута.
- точность измерения азимута.
Системе (1.8) соответствует графическое описание рис. 1.6.
На схеме ![]() - признак, характеризующий участок предыдущий аналогично
- признак, характеризующий участок предыдущий аналогично ![]() . Её узлу 1 соответствует расчёт
. Её узлу 1 соответствует расчёт ![]() , а узлам 11,12,13 -
, а узлам 11,12,13 - ![]() . Дуги определяют конкретные значения
. Дуги определяют конкретные значения ![]() Из этой схемы значит, что при анализе отдельных участков возможно всего 9 ситуаций, которые приводятся к 5-ти различным: участок расположен на кривой (K);
Из этой схемы значит, что при анализе отдельных участков возможно всего 9 ситуаций, которые приводятся к 5-ти различным: участок расположен на кривой (K);
- участок расположен на прямой вставке (ПВ);
- на участке находится начало кривой (НК);
- на участке находится конец кривой (КК);
- на участке заканчивается одна (К/Н) кривая и начинается вторая («зигзаг»).
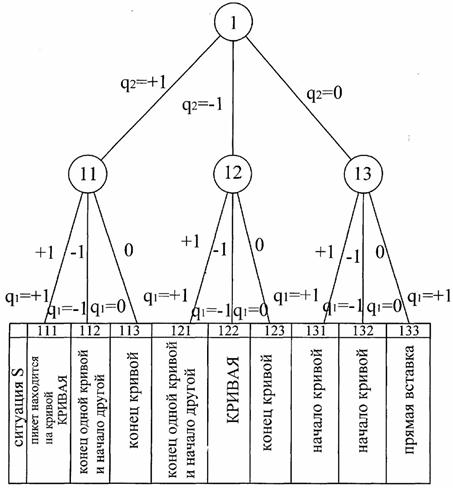
Рис. 1.6 Графическое описание условия задачи определения геометрических элементов дороги
Аналитически оценка участка или ситуация S является множеством значений ![]() , которое однозначно определяется тройкой измеренных значений азимутов, то есть:
, которое однозначно определяется тройкой измеренных значений азимутов, то есть: ![]() ,
, ![]() ,
, ![]() (для участка j);
(для участка j);
![]() (для участка j-1).
(для участка j-1).
Точность ![]() определяется размерами элементарного участка, который представляет собой в частном случае участок дороги протяжённостью 100 м (пикет). Минимальный размер элементарного участка - расстояние между двумя проведенными замерами для рассматриваемых примеров. Это расстояние, на котором колесо дорожной лаборатории сделает 5 оборотов. В результате работы дорожной лаборатории мы получим файл данных о геометрии дороги и скорости передвижения. Так как измерения будут выполняться через фиксированное число оборотов колеса, то, зная его диаметр, несложно вычислить путь, обеспечить привязку результатов измерений по пикетам обследуемого участка дороги. Эта привязка, приведение результатов измерений к виду, удобному для анализа результатов обследования - задача камеральной обработки регистрируемых параметров.
определяется размерами элементарного участка, который представляет собой в частном случае участок дороги протяжённостью 100 м (пикет). Минимальный размер элементарного участка - расстояние между двумя проведенными замерами для рассматриваемых примеров. Это расстояние, на котором колесо дорожной лаборатории сделает 5 оборотов. В результате работы дорожной лаборатории мы получим файл данных о геометрии дороги и скорости передвижения. Так как измерения будут выполняться через фиксированное число оборотов колеса, то, зная его диаметр, несложно вычислить путь, обеспечить привязку результатов измерений по пикетам обследуемого участка дороги. Эта привязка, приведение результатов измерений к виду, удобному для анализа результатов обследования - задача камеральной обработки регистрируемых параметров.
По приведенной схеме и определений функциональной зависимости несложно выполнить построение алгоритма.
Алгоритм определения геометрических элементов дороги включает: определение исходных данных (п.1-2); расчёт разности направлений оцениваемого и предшествующего элемента дороги, оценка его кривизны (п.3-9); идентификация оцениваемого элемента дороги (п.10-25).