
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
1.3. Пример подготовки математического описания системы для её моделирования на компьютере
Пусть необходимо провести моделирование некоторой подсистемы, представляющей рассмотренный автомат Мура, в который добавлена обратная связь. Вариант схемы модели этого автомата приведён на рис. 1.2.
Так как матрица В не является нулевой, то схема на рис. 1.2 описывается неоднородным разностным уравнением:
style=font-size:14.0pt;font-family:"Calibri","sans-serif";position:relative; top:4.0pt>![]() .
.
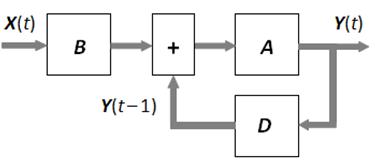
Рис. 1.2. Автомат Мура
Если матрица В – нулевая, что в технике эквивалентно отсутствию входных сигналов, то приведённая модель называется автономной.
Общее решение неоднородного уравнения состоит, как известно, из суммы решений однородной части U(t) = A Y(t–1) этого уравнения и частного решения указанного неоднородного уравнения. Необходимым условием устойчивости получаемого решения является устойчивость решения однородного уравнения. Для устойчивости решения однородного уравнения необходимо и достаточно, чтобы все характеристические числа λi этого уравнения (собственные значения матрицы A) находились в единичном круге комплексной плоскости. Если имеются ещё и некратные характеристические числа, лежащие на указанном круге, то решение считается условно устойчивым. Примером такого решения является дискретная синусоида с постоянной амплитудой колебаний.
Для трехмерной матрицы A значения её λi определяются из характеристического уравнения
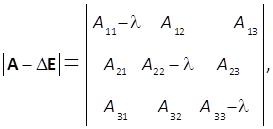
в котором E – единичная матрица.
Таким образом, если вопрос об устойчивости решения Y(t) рассматриваемого автомата можно решить на прибегая к моделированию, то графики этого векторного решения удобно получать с помощью моделирования.
Читателям рекомендуется составить векторное уравнение и соответствующую ему систему скалярных уравнений, описывающих работу автономной модели, приводимой на рис. 1.3. Матрицы A и B имеют размерность 3´3.
|
|
|
|
|
|
|
+ |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|||||||||||||||||

Рис. 1.3. Автономная модель