
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
1.2.Основные понятия и требования к АБУ
Существующие шпиндели принято разделять на жесткие и гибкие, что требует различного подхода при их балансировке.
К жестким относят шпиндели, которые сбалансированы на частоте вращения меньше первой критической в двух произвольных плоскостях коррекции и у которого значения остаточных дисбалансов не будут превышать допустимые на всех частотах вращения вплоть до наибольшей эксплуатационной [9].
Гибким называют шпиндель, который сбалансирован на частоте вращения меньше первой критической в двух произвольных плоскостях коррекции и у которого значения остаточных дисбалансов могут превышать допустимые на иных частотах вращения вплоть до наибольшей эксплуатационной [9].
Неуравновешенностью шпинделя называют такое распределение масс, при котором во время вращения на его опорах возникают переменные нагрузки и происходит его изгиб. Неуравновешенность жесткого шпинделя бывает статической, моментной и динамической [9, 81].
При статической неуравновешенности ось шпинделя и его ГЦОИ параллельны. Статическая неуравновешенность полностью определяется главным вектором дисбалансов (эксцентриситетом центра масс шпинделя) или относительным смещением ГЦОИ относительно оси шпинделя, равным значению эксцентриситета центра его массы.
При моментной неуравновешенности ось шпинделя и его ГЦОИ пересекаются в центре масс шпинделя. Моментная неуравновешенность полностью определяется главным моментом дисбалансов шпинделя или двумя равными по значению антипараллельными векторами дисбалансов, лежащими в двух произвольных плоскостях, перпендикулярных оси шпинделя.
Динамическая неуравновешенность возникает, когда ось вращения шпинделя и его главная центральная ось инерции пересекаются или перекрещиваются. Динамическая неуравновешенность состоит из моментной и статической неуравновешенностей.
Неуравновешенность шпинделя характеризуется векторной величиной, равной произведению неуравновешенной массы m на ее эксцентриситет e, которая называется дисбалансом D. При этом вектор дисбаланса перпендикулярен оси шпинделя, проходит через центр неуравновешенной массы и вращается вместе со шпинделем. Направление вектора дисбаланса совпадает с направлением эксцентриситета неуравновешенной массы. Возможны случаи, когда на шпинделе находятся несколько неуравновешенных масс.
Процесс определения значений и углов дисбалансов шпинделя и уменьшения их корректировкой масс называют балансировкой шпинделя.
Если шлифовальный круг или сменная насадка, вращающиеся со шпинделем, расположены на нем так, что их плоскость неизбежно получает отклонения, связанные с упругими поворотами сечения шпинделя относительно экваторной оси, то между шпинделем и инструментом возникает гироскопический момент [31]. Данный момент стремится совместить ось вращения вала с концом вектора отклонения диска. При этом диск совершает прецессионное движение, как гироскоп. Прецессия может совершаться как в сторону вращения вала (прямая), так и в противоположенную (обратная). Прецессия складывается из двух колебательных движений в виде поворота диска вокруг двух перпендикулярных экваториальных осей, проходящих через центр тяжести диска.
Из курса теоретической механики [18] известны зависимости, позволяющие вычислять добавочные динамические реакции опор при вращении неуравновешенного шпинделя вблизи критических скоростей:
| | (1.1) |
где: m – масса шпинделя;
e, w - угловое ускорение и угловая скорость вращения шпинделя;
yc, xс – координаты центра масс тела относительно оси вращения;
IХZ, IYZ – центробежные моменты инерции относительно оси вращения;
XA, YA, XB, YB – реакции по осям Х и Y в опорах А и В.
Добавочные динамические реакции будут равны нулю при нахождении на оси вращения центра масс шпинделя и равенстве нулю центробежных моментов инерции относительно оси вращения. Поэтому основным условием для обеспечения работоспособности АБУ будет совмещение оси вращения шпинделя с его ГЦОИ, что достигается перераспределением масс внутри вращающегося шпинделя.
При равенстве частот вращения и собственных колебаний шпинделя наступает резонанс. Эту частоту называют критической. При эксплуатации станка на этой частоте вращения будет резко понижаться точность вращения шпинделя, а с ней и качество обрабатываемых деталей и ресурс подшипников. При балансировке механизмов необходимо знать числовые значения критических частот вращения для классификации шпинделя и выбора соответствующего типа АБУ.
Для понимания физического явления возникновения критических скоростей принято рассматривать простейший шпиндель с неуравновешенным шлифовальным кругом массы М посредине, вращающийся с угловой скоростью w (рис. 1.1.). Если до начала вращения шпиндель получил начальный прогиб х и имел некоторый эксцентриситет центра масс круга е относительно оси шпинделя, то он будет вращаться в изогнутом состоянии, что приведет к возникновению двух сил [13, 32]:
силы упругости ![]() (где с – коэффициент жесткости вала), которая стремится вернуть шпиндель в недеформируемое состояние (для вала постоянного сечения
(где с – коэффициент жесткости вала), которая стремится вернуть шпиндель в недеформируемое состояние (для вала постоянного сечения ![]() , где EI – жесткость на изгиб);
, где EI – жесткость на изгиб);
и центробежной силы ![]()
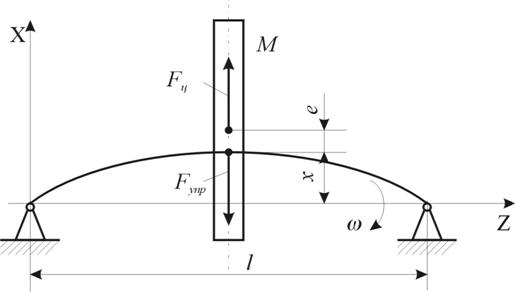
Рис. 1.1. Расчетная схема критической частоты вращения шпинделя
Cилу тяжести, оказывающую знакопеременное действие на вращающийся горизонтальный шпиндель в инженерных расчетах можно не учитывать, так как при вращении шпинделей современных станков она составляет величину на несколько порядков меньше центробежной силы [23].
Из условия равновесия сил упругости и центробежных сил можно получить:
| | (1.2) |
Из данной зависимости следует, что при некоторой частоте вращения, называемой критической, прогиб шпинделя теоретически может увеличиться до бесконечности при отсутствии рассеивания энергии (знаменатель обращается в ноль), при этом критическая скорость равна ![]() . При дальнейшем увеличении частоты вращения происходит уменьшение прогиба, а при ω→∞ центр масс круга оказывается на оси вращения т.е.
. При дальнейшем увеличении частоты вращения происходит уменьшение прогиба, а при ω→∞ центр масс круга оказывается на оси вращения т.е. ![]() . Это и есть условие «самоцентрирования» неуравновешенного шпинделя с инструментом, вращающегося на закритической частоте. Иными словами, шпиндель на частоте свыше критической самобалансируется, перемещая либо свободные массы, расположенные в нем в сторону противоположную дисбалансу, либо изгибаясь совмещает ось вращения с ГЦОИ круга.
. Это и есть условие «самоцентрирования» неуравновешенного шпинделя с инструментом, вращающегося на закритической частоте. Иными словами, шпиндель на частоте свыше критической самобалансируется, перемещая либо свободные массы, расположенные в нем в сторону противоположную дисбалансу, либо изгибаясь совмещает ось вращения с ГЦОИ круга.
Известно, что стремление к самобалансировке может быть подавлено действием диссипативных сил, которые оказывают двоякое влияние на динамическое поведение шпинделя при вращении его на сверхкритических скоростях [16]. С одной стороны они обеспечивают асимптотическую устойчивость по соответствующим координатам, а с другой - могут нарушить условия существования эффекта самобалансировки, т.е. при определенных условиях могут привести к потере устойчивости движения.
Учитывая свойства вращающейся неуравновешенной системы, можно сформулировать ряд требований, которым будет отвечать идеальное АБУ [13]:
- устройство должно обеспечивать полную компенсацию наибольшей, возможной для данного шпинделя неуравновешенности (емкость АБУ);
- устройство должно максимально устранять неуравновешенность на шпинделе, т.е. остаточная неуравновешенность должна быть минимальной (точность АБУ);
- АБУ не должно мешать основному технологическому процессу;
- дополнительная неуравновешенность не должна вноситься устройством ни на каких режимах работы станка, особенно на критических оборотах, так как при них чувствительность к неуравновешенности наибольшая;
- АБУ должно эффективно работать на ниже и выше критической скорости и обеспечивать плавный переход шпинделя через критическую скорость в сбалансированном состоянии;
- устройство должно автоматически реагировать на изменения неуравновешенности в процессе эксплуатации шпинделя;
- работа устройства должна быть обеспечена при любом положении шпинделя в пространстве;
- при уравновешивании гибкого шпинделя должны уменьшаться не только реакции опор, но и возникающие в нем изгибные напряжения;
- конструкция АБУ должна быть максимально простой, надежной в работе и легко обслуживаться;
- при работе АБУ не должно негативно влиять на окружающую среду и персонал, находящийся поблизости.
Кроме того, существует множество требований для различных типов АБУ, которые определяются их условиями работы в определенных областях. Например, массогабаритные свойства или энергозависимость.
В настоящее время в существующих станках и ручном инструменте используются АБУ, лишь частично удовлетворяющие этим требованиям.