
Научная электронная библиотека
Монографии, изданные в издательстве Российской Академии Естествознания
Лекция 25. Ситуационное управление
Использование опыта при организации требуемого функционирования сложной системы многообразно: опыт в информационных технологиях [см. лекцию 22], методы активизации интуиции исследователя [см. лекцию 23], методы прогнозирования [см. лекцию 24] и пр. В этом ряду возможностей всё, что связано с повторением прошлого опыта, то есть с выбором тех знаний из прошлого (опыта), которые напоминают текущие обстоятельства, которые похожи или идентичны им, имеет особое значение.
Принято считать, что метод ситуационного управления относится к наиболее перспективным методам, позволяющим для широкого класса систем решать задачу поиска (в процессе адаптации) алгоритмов работы системы управления (проф. Поспелов Д.А., 1977). Следующие положения составляют начальное понятие о ситуационном управлении[233].
Существо ситуационного управления. В основе ситуационного управления лежит гипотеза о том что вся необходимая информация об управлении объектом, которым до создания системы управления плохо или не очень плохо управляли люди, может быть получена из непосредственного наблюдения за их работой или из их словесных объяснений.
Если считать, что поведение людей в процессе управления можно описать на некотором естественном человеческом (этническом) языке, модель управления объектом может быть получена на основании специальной обработки текстов на естественном языке, в которых описан достаточно большой опыт людей.
Прежде чем переходить к построению модели ситуационного управления, сформулируем основную задачу, которую необходимо решить в процессе построения модели управления.
Если множество решений {P(t)} имеет мощность l, то задача управления будет решена, если можно найти такое разбиение множества ситуаций {S(t)} на l классов, при котором все ситуации S(t) окажутся отнесенными к какому-нибудь определенному классу Ki, которому однозначно соответствует некоторое решение Pi. И это разбиение обладает тем свойством, что для ситуаций, относимых к классу Ki, решение Pi, действительно, полезно с точки зрения целей управления.
Однако в некоторой конкретной ситуации S(t) может оказаться, что нельзя указать единственное решение Pi, наиболее полезное в данной ситуации. Таких решений может быть несколько, и разные специалисты по управлению данным объектом будут предпочитать разные из этих решений. Это соображение (на практике почти всегда имеющее место) приводит нас к постановке задачи не разбиения ситуаций {S(t)} на классы (при котором каждая конкретная ситуация относится в точности к одному классу), а к постановке задачи о нахождении покрытия множества ситуаций {S(t)} совокупностью классов Ki. В этом случае допускается такое положение, при котором некоторые ситуации S(t) одновременно принадлежат нескольким классам Ki. Требуется только, чтобы любая конкретная ситуация S(t) принадлежала хотя бы одному классу Ki.
Суть ситуационного управления и состоит в построении метода, позволяющего на основании описания ситуаций S(t) на естественном языке строить систему обобщенных описаний классов Ki. Будем ситуации S(t) и описания этих ситуаций называть соответственно микроситуациями и микроописаниями, а классы Ki и их описания – макроситуациями и макроописаниями.
Микроописания. Выделим в естественном языке ряд элементов, выполняющих в нем определенную функциональную роль. При этом под элементами языка будем понимать отдельные слова, словосочетания и синтагмы (законченные в смысловом отношении словосочетания). Выделим прежде всего группу понятий.
1. Будем обозначать понятия как ai, а множество используемых понятий – как A. Среди понятий выделим два типа: понятия-классы и абстрактные понятия. Первый тип понятий связан с отражением в языке сведений об однородных физических объектах внешнего внеязыкового мира. Эти сведения поступают в систему в виде некоторых комплексов признаков.
Поясним это на простом примере. Понятие – класс «собака» включает в себя всех представителей животного мира, которых мы склонны называть этим словом. В окружающем нас мире не существует, однако, собаки вообще, а существуют конкретные представители этого понятия-класса. Каждый из них воспринимается нашими органами чувств в виде некоторого набора значений-признаков. В число этих признаков могут входить размер и форма ушей, цвет, наличие шерсти, тип звуков, издаваемых животным, форма тела и т.п. В языке же по некоторым законам всем этим конкретным физически существующим собакам сопоставляется слово «собака», являющееся понятием-классом. Другими примерами понятий-классов могут служить, например, слова и словосочетания: стол, прибор, столярный инструмент, электронные системы обработки данных.
В отличие от понятий-классов, абстрактные понятия не имеют непосредственных аналогов в том мире, который нас окружает. Эти понятии возникают внутри языковой системы с помощью специальных «механизмов». Примерами таких понятий могут служить понятия, выражаемые такими словами и словосочетаниями, как цель, красное, точка прямой и т.п. Число различных понятий в любом естественном языке потенциально бесконечно. Всегда можно ввести в него ещё одно понятие-класс или абстрактное понятие.
2. Второй важной функциональной группой в любом естественном языке являются имена и идентификаторы. С помощью имён в языковой системе производится, в частности, выделение (персонофикация) отдельных понятий из понятий-классов. Примерами имён могут служить следующие слова, словосочетания и синтагмы: Иванов, дом № 12 по улице Вавилова, дом, который построил Джек. Множество имён будем обозначать через I, а отдельные имена через ij. Множество имён, как и множество понятий, потенциально бесконечно.
3. Третьей функциональной группой является группа отношений R. Элементы, входящие в группу отношений (обозначаемых ri), описывают бинарные отношения, которые устанавливаются между парой понятий или понятием и именем. Примерами отношений могут служить: часть-целое, причина-следствие, объект-действие, объект-место, быть одновременно, пересекаться, служить для и т.п.
Очень важно подчеркнуть, что любое из отношений может в языке выражаться с помощью многих слов, словосочетаний, синтагм или грамматических средств. Например, в синтагмах: автомобиль подъезжает к перекрёстку, автомобиль приближается к перекрёстку, автомобиль несётся к перекрёстку, между понятиями-классами «автомобиль» и «перекрёсток» устанавливается одно и то же отношение, которое может быть выражено, например, словами «двигаться к».
Таким образом, сами отношения имеют внеязыковой характер, выражаясь в языке с помощью определенных (но жестко не зафиксированных) языковых средств. Сами слова, словосочетания или синтагмы, с помощью которых выражается данное отношение, можно рассматривать, как множество имён данного отношения. Особенностью отношений является наличие универсального конечного множества отношений, с помощью которого удаётся выразить все отношения, отражаемые в языковой системе. При этом мощность этого универсального базового множества сравнительно невелика, в него входят около 200 разных отношений.
4. Последняя группа элементов языка (для основ ситуационного управления) – это группа императивов. К императивам относят все слова, словосочетания и синтагмы, указывающие на действие, которое необходимо осуществить. Примерами императивов могут служить выражения: включить станок № 2, сменить режим № 3 и т.п. Множество императивов будем обозначать через P, а элементы этого множества – через pj. Вместо термина «императив» будем употреблять термин «элементарное решение». Количество различных элементарных решений, отразимых в языке, потенциально бесконечно.
Рассмотрим теперь некоторую гипотетическую систему управления, которую требуется спроектировать в условиях отсутствия модели объекта управления. В каждый текущий момент времени на вход системы управления поступает некоторая информация, образующая описание текущей ситуации. Не разделяя различные типы входных воздействий на систему управления, будем их обозначать набором Q = <q1, q2, ..., qm>. Будем предполагать, что априорно заданы некоторые базовые списки понятий-классов, имен, отношений и элементарных решений, которые можно в соответствии с технологией объекта принимать в процессе управления. Тогда на первой стадии обработки информации, содержащейся в наборе Q, происходит переход от этого набора к микроописанию ситуации в виде определенной структуры, отражающей отношения, имеющиеся в данный текущий момент времени между понятиями, входящими в описываемую ситуацию.
Поясним это на простом примере. Пусть необходимо управлять движением автотранспорта на перекрёстке [рис. 66]. Зададим списки понятий-классов, имён, отношений и элементарных решений для этого конкретного случая. Список базовых понятий-классов будет содержать следующие элементы: a1 – автомобиль, a2 – снаряжение, a3 – скорость, a4 – створ (сечение), a5 – тип, a6 – цвет, a7 – светофор.
Список базовых имён включает в себя множество допустимых номерных знаков автомобилей, целые числа от 1 до 5 и числа с интервалом через пять единиц от 0 до 140, буквы A, B, C, D, слова: обычный, специальный, красный и зелёный. Все имена, кроме последних четырёх, будем обозначать так, как они выражены, а последние четыре имени сокращённо обозначать как об., сп., кр. и зел.
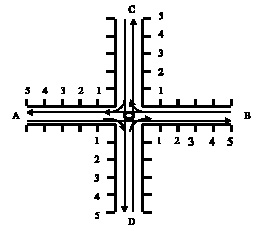
Рис. 66. Четырёхсторонний перекрёсток со светофором, на котором разрешён проезд в прямом направлении и только с правым поворотом
Множество имён разбивается на подмножества имён для отдельных понятий-классов. Так, именами понятия-класса «скорость» могут быть лишь числа от 0 до 140 с интервалом через пять единиц, а именами для понятия-класса «створ» – числа от 1 до 5. Список базовых отношений, нужных для данного примера управления объектом, включает в себя следующие отношения: ? – иметь имя, r1 – обладать, r2 – быть одновременно, r3 – находиться на. Наконец, список элементарных решений состоит из двух элементов: P1 – включить красный сигнал в направлении AB [рис. 66], P2 – включить зелёный сигнал в направлении движения AB.
Предполагаем, что на всех створах [рис. 66] установлены датчики, с помощью которых в систему управления передаётся информация, содержащая в себе номер створа, имя направления, а также следующие сведения об автомашинах, пересёкших в интервале времени между моментами t – 1 и t створ: автомобиль, его мгновенная скорость, тип. Имеется также датчик самого светофора, фиксирующий одно из двух возможных его текущих состояний (для управления автотранспортом достаточно двух сигналов светофора: красный и зелёный). Вся эта информация, поступающая из датчиков, и образует набор Q.
Переход от Q к микроописанию происходит на основе того, что вся информация о ситуации оказывается привязанной ко времени, створам и направлению. Набор Q, по сути задаёт некоторую обстановку на ДСС, имеющую более простой вид, чем ранее рассмотренная ДСС [рис. 46, лекция 19]. Таким образом, в отличие от Q, описание микроситуации должно быть структурированным, содержащим отношения между понятиями и именами.
Пусть, например, в некоторый момент времени в окрестности управляемого перекрёстка складывается следующая ситуация: по направлению A на четвёртом створе к перекрёстку следует грузовая автомашина с номером 06-45МОЛ со скоростью 40 км/час; по направлению B к перекрёстку движется легковая автомашина с номером 06-33МКЩ со скоростью 70 км/час,
которая только что прошла пятый створ, а на первом створе этого же направления ожидает проезда через перекрёсток легковая автомашина с номером 07-12МКЭ. В направлении C автомашин нет, а в направлении D к перекрёстку со скоростью 100 км/час на уровне пятого створа приближается автомашина скорой медицинской помощи с номером 11-22МКЛ. Зелёный сигнал светофора горит в направлении CD.
Эта ситуация может быть следующим образом описана на языке микроописания ситуаций. Будем строить описание последовательно. Первое предложение:

С помощью этого предложения фиксируется положение одной автомашины на ДСС. Остальные три предложения, относящиеся к другим автомашинам, аналогичны по своей структуре.
Второе предложение:

Третье предложение:

Четвёртое предложение:

Предложение, относящееся к светофору, выглядит следующим образом:

Полностью микроситуация в окрестности перекрёстка может быть описана следующим образом:  .
.
Введём теперь отношение r, смысл которого можно передать словами: «следует применить элементарное решение». Тогда указание по управлению светофором в описанной ситуации S может выглядеть как текст вида (SrP1).
Приведенный пример показывает, что управление на основе микроописания явно неэффективно. Ведь на самом-то деле для принятия решения о включении зелёного сигнала светофора в направлении CD совсем нет необходимости знать что-либо, кроме информации, содержащейся в предложении S4. Человек, управляющий светофором на перекрёстке, так и поступит. Для него все ситуации S, которые могут возникнуть в окрестности перекрёстка, связанные с наличием приоритетной специальной автомашины, сливаются в одну макроситуацию: есть приоритетная машина. Именно в этом и заключается в данном конкретном случае процесс слияния (обобщения многих микроситуаций в одну макроситуацию).
Однако даже при отсутствии в окрестностях перекрёстка приоритетных специальных автомашин специалист по управлению движением вряд ли будет использовать всю информацию, содержащуюся в микроописании. Ему, например, как правило, совершенно безразличны номера автомашин, участвующих в образовании микроситуации (если только эти номера не несут дополнительных сведений о приоритетности проезда или если одновременно с регулированием движения на перекрёстке не решается задача о поиске автомашины с определенным номером).
При наличии автомашин в одном из направлений и отсутствии их в другом направлении регулировщик может для целей управления не использовать никакой другой информации, содержащейся в микроописании. Число подобных примеров можно увеличить, но в этом вряд ли есть необходимость. Из сказанного ясно, что для построения алгоритма управления необходимо разработать специальные «механизмы» обобщения описаний, позволяющие классифицировать все возможные микроописания в макроописания, соответствующие элементарным решениям.
Обобщающие «механизмы». В ситуационном управлении используются три типа подобных механизмов: снятие имён, обобщение по признакам и обобщение по структурам.
Наиболее просто осуществляется процедура снятия имён. Из описания ситуации просто исключаются имена и выражения вида (a ?i) заменяются на a. Такой переход позволяет вместо конкретных утверждений, относящихся к персонифицированным объектам, получать обобщенные описания, пригодные для всех объектов, попадающих в одно понятие-класс.
Обобщение по признакам служит для образования понятий-классов и абстрактных понятий. Механизмы подобного типа хорошо известны в распознавании образов, где они являются основными. Их суть состоит в построении такой функции ? от признаков <?1, ?2, ..., ?n>, которая оценивала бы степень принадлежности данного физического понятия (комплекса ощущений или, точнее, набора значений признаков) к определенному понятию-классу. Примером использования такого приёма обобщения может служить обобщенное понятие-класс «специальный транспорт». Пусть признак ?1 принимает значение 1, если автомашина является автомашиной скорой помощи. В противном случае ?1 = 0. Аналогично ?2 и ?3 обращаются в 1, если данная автомашина является пожарной или аварийной треста Горгаз (если это не так, то ?2 = ?3 = 0). Пусть, наконец, ?4 = 1, если автомашина обладает световой сиреной и ?5 = 1, если автомашина выкрашена в красный или желтый цвет. Тогда можно определить функцию ? как функцию алгебры логики следующего вида:

Если ? = 1, то данный объект относится к понятию-классу «специальный автотранспорт», в противном случае – нет. Для понятий –классов, используемых в обычном языке, очень часто невозможно построить функцию принадлежности к понятию-классу, которая принимала бы лишь два значения: принадлежит и не принадлежит. Такие понятия-классы и абстрактные понятия как «разумное решение», «близкий результат», «колонна автомашин» не имеют четко очерченных границ. Разные люди по-разному формируют отнесение объектов к этим совокупностям.
В математике принято говорить, что в подобном случае мы имеем дело с размытыми множествами. Для размытых множеств функция ? для каждого конкретного набора ?i может принимать любые значения 0 ? ? ? 1. При этом если 0 ? ? ? 1,то говорят, что данный объект принадлежит понятию-классу или абстрактному понятию со степенью достоверности ?.
Обобщение по структурам наиболее важно для ситуационного управления. Важность достаточно наглядна на примере производного понятия «колонна автомашин». Введём отношение r4 – быть сзади и отношение r5 – находиться в ближайшей окрестности. Рассмотрим микроописание ситуации, в котором использованы те же обозначения, что и в рассмотренном примере описания микроситуации на перекрёстке (лишь вместо полного описания номерных знаков автомашин используем сокращённые имена, обозначаемые как ij):

Это предложение означает, что одновременно существуют десять автомашин с именами i1 – i10. Для простоты записи будем использовать сокращённое обозначение ?j для синтагмы (a1?ij).
 – это предложение утверждает, что все десять автомашин движутся в направлении к перекрёстку.
– это предложение утверждает, что все десять автомашин движутся в направлении к перекрёстку.
 – это предложение означает, что автомашина ?1 находится сзади автомашины ?2, ?2 – сзади ?3 и т.д.
– это предложение означает, что автомашина ?1 находится сзади автомашины ?2, ?2 – сзади ?3 и т.д.
 – это предложение указывает на то, что автомашины попарно находятся в ближайшей окрестности друг от друга с учетом их упорядоченности.
– это предложение указывает на то, что автомашины попарно находятся в ближайшей окрестности друг от друга с учетом их упорядоченности.
Общее описание ситуации имеет вид:  .
.
Вся эта ситуация может быть отнесена в один новый класс, соответствующий понятию-классу «колонна автомашин». Понятием, которое может быть получено из таких понятий, как «колонна автомашин», «колонна людей», «колонна судов» и т.п., можно получить понятие-класс более высокого уровня – «колонна». Как и в случае обобщения по признакам, понятия-классы, получаемые при обобщении по структуре, носят также характер размытых множеств.
Классификатор. Теперь можно описать основной принцип построения классификатора, являющегося центральной моделью в системе моделей ситуационного управления. Построение классификатора осуществляется на основании обучения с помощью специалистов, имеющих опыт управления объектом, для которого мы ищем модель управления.
Процедура обучения. Составляется специальная двухвходовая обучающая таблица: в левой половине перечисляются микроописания, а в правой – те элементарные решения, которые по мнению экспертов следует принять в этой ситуации. При этом в правой половине таблицы может быть указано не одно, а несколько таких решений.
С помощью этой таблицы формируются обобщенные описания различных уровней. С целью большей наглядности описания этого процесса будем представлять микроописания в виде мультиграфов, вершины которых соответствуют понятиям и именам, а дуги – отношениям [рис. 67].
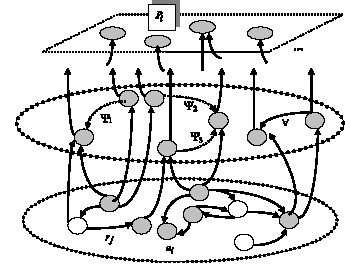
Рис. 67. Общая структура классификатора, где Yi – нечёткие кванторы
На нижнем уровне [рис. 67] отображаются текущие ситуации, описанные на микроуровне. Заштрихованные вершины соответствуют понятиям, которые имеются в описании данной конкретной ситуации. Выше идут уровни обобщения. Между обобщенными понятиями тоже устанавливаются отношения, но, в отличие от исходных отношений, они взвешиваются некоторыми нечеткими кванторами Yi типа: почти для всех, почти ни для кого, примерно в половине случаев, часто, редко, почти никогда и т.п. С помощью квантора ?, как обычно, обозначен квантор общности («для всех»).
Если, например, в результате операции обобщения получено два понятия «серое» и «кошка», то между ними нельзя установить впрямую отношение «обладать цветом», ибо не все кошки серые, и не всё серое будет кошкой. Для условий среднерусской полосы между этими понятиями можно установить отношение «обладать цветом», взвешенное квантором «примерно в половине случаев».
На самом верхнем уровне обобщения [рис. 67] находятся базовые решения, которые рекомендуется принимать при появлении данной фактической микроситуации на нижнем уровне. При подаче на нижний уровень классификатора конкретной ситуации на верхнем уровне может возбудиться не обязательно единственное решение, то есть ситуации могут классифицироваться неоднозначно. Для дальнейшего выбора решения используются другие блоки модели ситуационного управления [рис. 68].
После окончания процесса обучения модель функционирует следующим образом. На вход модели поступает описание исходной ситуации, которое входным блоком перерабатывается в стандартное представление в виде микроописания. Блок Анализатор либо обращается к классификатору, либо, если ситуация оказалась для него типовой, передаёт её в коррелятор. Блок Коррелятор содержит в себе набор правил вида ? ? ?, смысл которых состоит в том, что при наличии в данной ситуации некоторой подситуации ? необходимо реализовать некоторое действие ?. Само действие при этом может быть либо некоторым решением, которое необходимо выдать из модели, либо указанием на проведение некоторых действий внутри модели (например, ввести технологические ограничения на класс допустимых решений). В процессе обучения классификатора из него в коррелятор поступают как раз правила ? ? ?. Блок Экстраполятор служит для моделирования результатов принятия выбранного в корреляторе решения на дальнейшее развитие процесса в объекте управления. После отбора нужного решения оно с помощью выходного блока преобразуется в некоторую стандартную выходную форму и выдаётся блоком Выходной блок на объект управления. Если ситуация для анализатора представляется нестандартной, то он передаёт её в классификатор, который на основании сгенерированной в процессе обучения структуры определяет множество решений, передаваемых в экстраполятор для выбора
из них лучшего.
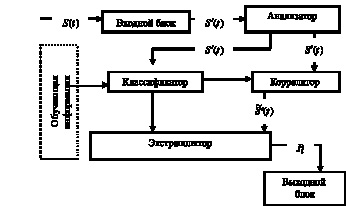
Рис. 68. Общая структура модели ситуационного управления
Контрольные вопросы по лекции 25:
1. В чём смысл ситуационного управления?
2. В основе ситуационного управления лежит определенная гипотеза. Почему именно гипотеза?
3. Поясните, почему сделано предположение о том, что поведение человека описывается на некотором этническом языке.
4. Оцените реальность возможности специальной обработки текстов, описывающих работу человека, для формирования модели процесса управления объектом.
5. В чём суть ситуационного управления?
6. Объясните, какова смысловая нагрузка макроописаний.
7. Поясните предложения S1–S5.
8. Зачем введено понятие обобщающего механизма?
9. Что такое обобщение по структурам?
10. Поясните роль классификатора при организации ситуационного управления.
11. Почему в общей структуре классификатора использованы нечёткие кванторы?
12. Объясните общую структуру модели ситуационного управления.